
指南針是一種重要的導航工具,在許多場合都具有應用價值。為了使指南針的性能更加優良,應用領域更加廣泛,我們設計制作了基于磁阻傳感器" title="傳感器">傳感器的低功耗" title="低功耗">低功耗方向指示系統。在一些特殊地形條件下,GPS 將無法很好的工作,而此方向指示系統卻不會受到影響,尤其適用于某些只要求檢測方向而不需要檢測所在經緯度的場合。
1 功能特色與指標要求
1.1 總體功能及特色
方向指示系統主要有方向指示功能、圖形顯示功能、磁偏角校正功能和信息鎖定功能,并具有便攜式和低功耗的特點。其界面設置圖如圖1 所示。
方向指示系統應用領域廣泛,可以應用到如下領域:手持式方向指示系統,車載導航與行程控制,移動電話中的指南針,望遠鏡定位,醫療器械中的方向指示,陸地和海洋導航系統。

圖1 界面設置圖
1.2 對設計的要求和指標:
為實現以上功能,系統需達到以下要求:
(1) 系統中的所有元件具有體積小,低功耗的特點。
(2) 系統中的所有元件都是標準的低成本元件;特別是微控制器,而且要有盡量多的在片外部模塊(如A/ D 和D/ A 轉換器) 。
(3) 由于傳感器的輸出信號很小,要求各元件抗噪聲能力強,電源輸出紋波小。
(4) 可顯示以下信息:
—以數字和圖形顯示機首方向;—以最臨近方位文字顯示機首方向。
(5) 指南針的讀數參考地理上的北———正北根據HMC105X 數據手冊,當接上低噪聲放大器和12 到162bit (位) 模數轉換器(A/ D) 時,使用HMC105X 系列傳感器可進行極高精度的測量。測量誤差小于1°,電路部分功耗小于115 mW。
2 系統設計:
2.1 系統整體設計
圖2 是方向指示系統的結構框圖,這是其最小設置。傳感器單元是采集地球磁場的部分,將地球磁場信號轉換為電信號;信號調整單元是對微弱的地磁電信號進行放大濾波,并將模擬信號轉換為數字信號;數據處理單元是將調整單元輸出的數字數據進行分析,確定所需要的方向與正北間的方向角,并對所在地的磁偏角進行校正。液晶顯示單元是將方向角以圖形和數字兩種形式顯示出來。
在本系統中,傳感器單元由一塊兩軸磁阻傳感器HMC1052 構成,信號調理單元為由儀表放大器組成的小信號放大電路。MSP430 單片機作為數據處理與信號控制核心,即數據處理與方向確定單元。
最終的顯示單元采用一塊128 ×64 圖形點陣LCD。
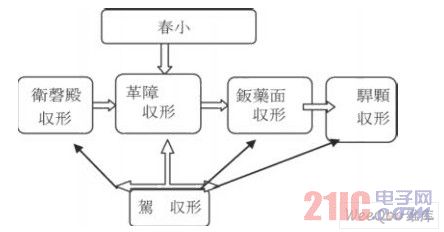
圖2 方向指示系統的結構框圖
磁阻傳感器HMC1052 將地磁場信號轉化成電信號,儀表放大器將該微弱信號放大,送入MSP430單片機的AD 模塊進行模/ 數轉換,單片機將數據進行分析計算確定方向角度,最后送到LCD12864 將其文字及圖形表達。圖3 是此系統的電路模塊圖。
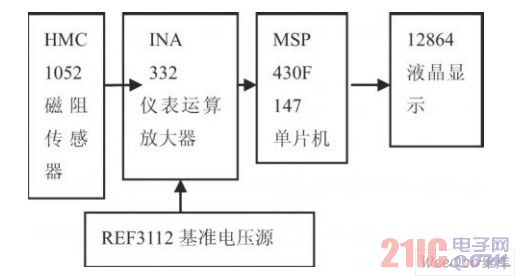
圖3 電路模塊圖。
2.2 重難點分析
本設計的重要部分在于信號調理單元。由于磁阻傳感器的輸出信號極小,只有1 到2 個mV ,需放大電路對來自傳感器的信號進行放大處理,為系統提供高精度的模擬輸入信號,它所放大的信號對系統的精度起著關鍵作用。因此,我們在放大增益的設定,參考電壓的選取,濾波設計,供電的穩定及電源紋波的處理等方面做了大量的工作,有效提高了方向指示系統的精度。我們將在后文中對這些工作加以詳細的闡述。
本設計的難點是磁阻傳感器的輸出信號太小,外界干擾、電源紋波、橋臂失衡等許多因素都會造成方向指示系統的精度降低,為此我們從理論分析論證和實際電路調試兩方面對系統的設計進行優化[。Ina332 儀表運放的選用可以有效地抑制傳感器輸出的共模信號,減小低溫飄和零飄干擾。其體積小、成本低、功耗小的特點也十分符合我們的設計初衷。硬件系統設計的難點就在于運放電路的設計,因微弱信號的放大是其主要功能。穩定的電源系統是整體電路工作正常的基礎,特別是模擬信號部分電源更是要求紋波頻率低、幅度小,以保證傳感器激勵和運放工作的要求。
2.3 理論分析計算
2.3.1 磁阻傳感器
HMC1052磁阻傳感器由兩個AMR 傳感器(各向異性磁阻傳感器) 整合在一起,可以把任何水平方向的磁場分解為X , Y 兩個方向的矢量。其工作原理如圖4 所示 。
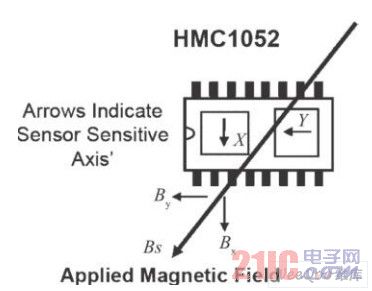
圖4 磁阻傳感器HMC1052 結構圖。
對每個AMR 傳感器來說,其原理是當各個磁阻傳感器感應到的磁場發生變化時,通用的電磁物質會在外部磁場中改變它的電阻系數,從而改變其阻值,因此阻抗式惠斯通電橋會輸出一定的電壓信號。每個電橋由四個阻值相同但磁性反相的磁阻元件組成。
雙軸羅盤系統的基本原理是使兩個傳感器電橋元件平行于地平面(垂直于重力場) ,并測量由此產生的X 和Y 的模擬輸出電壓。當放大的傳感器電橋電壓幾乎同時轉換成(被測為) 等量數字信號時,就可計算出Y/ X 的反正切, 從而得到與X 軸測量方向相關的方位信息。
AMR 傳感器的輸出電壓通過測量Out + 到Out - 之間的電壓得出,它是傳感器靈敏方程的函數,即:

其中: S 為靈敏度(mV/ V Gauss) ;V b 為電橋輸入電壓(V) ;Bs 為電橋感應強度( Gauss)。
在本系統中V b = 電源電壓= 313 V ,Bs = 地磁場強度= 0155 Gauss (公認值) , HMC1052 的靈敏度S = 110 mV/ V Gauss , 可得到傳感器輸出電壓為:
![]()
2.3.2 放大倍數分析與計算
INA332 是Rail - Rail 輸出、低功率CMOS 儀表放大器,可單電源工作。INA332 系列產品提供微功率、低價格、低噪聲儀表放大器,其特性是低功率電池和多路技術應用的最佳選擇。INA332 具有寬帶寬和高轉換速率,可理想地應用于驅動取樣模一數轉換器,也可當作通用型儀表放大器使用。圖5 是其內部結構圖。
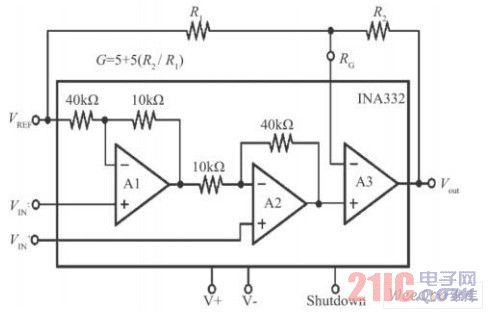
圖5 儀表放大器INA332 結構圖。
由于噪聲的不可避免,必將造成理論分析與實際結果的一定誤差。為達到項目規劃的3°方向精度目標,這里將該指標要求提高后帶入分析。分析如下:
將0°~90°范圍內的電壓輸出N 等分,則當輸出值有一個最小分度的變化時,其造成的角度變化應小于精度指標,這里設為1°。而該變化導致輸出角度變化最大應在45°附近。經分析N = 200 時,角度最大變化量= arctan ( (100 + 1) / (100 - 1) ) - 45°= 015°,符合要求。
經測試,MSP430 內部的12ADC 可靠的位數約為10bit ,為獲得較大電壓檢測范圍,選擇內部參考源215 V ,則可靠分辨力= 215 V/ 2^10 = 215 mV。
對于傳感器任一軸放大后的輸出,其變化范圍應是2 N (0~180°) ,則得到放大后的電壓范圍是215 mV ·2 N = 1000 mV。
則由傳感器輸出11815 mv 得放大倍數為1000/ 11815 = 550。
因此合理的放大倍數范圍可以是400~600 倍。
2.3.3 噪聲分析與計算
噪聲來源 線性穩壓電源。
噪聲形式 頻率為10 kHz 級的紋波。
噪聲參數 表1 為傳感器HMC1052 和儀表運放INA332 的噪聲參數(單位:nV/ √Hz)。
表1 噪聲參數表
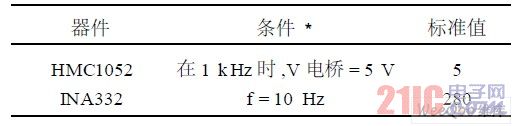
噪聲幅度 280 ×√10 ×500 (放大倍數) =10 mV 級 。
分析 噪聲具有一定幅度,對輸出造成影響,將在程序中采用軟件濾波來減小其影響。
2.4 硬件設計
2.4.1 電源模塊
本電路提供了兩種電源的輸入方式———電池供電(由圖中BA T 輸入) 和DC/ DC 適配器供電(由圖中J 1 輸入) ,通過波動開關K1 選擇供電方式,K2 為總電源開關。電源穩壓器件為線性穩壓芯片AMS1117 ,輸出313 V ,作為硬件系統其他芯片與電路的電源。
2.4.2 傳感器及信號放大電路
該部分由傳感器HMC1052 、儀表運放INA332和電壓參考源REF3212 組成,完成系統的模擬電路功能。其原理如圖6 所示。
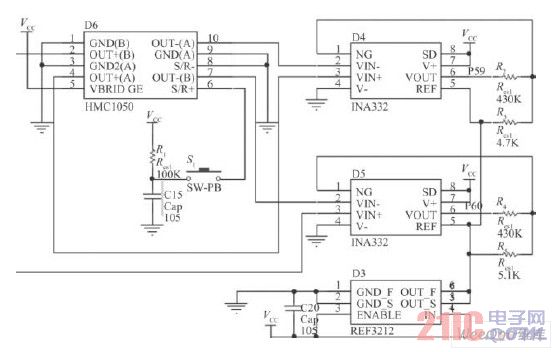
圖6 放大電路模塊原理圖。
由21312 中運放的放大倍數G = 5 + 5 (R2 / R1 )可得,兩軸信號的放大倍數分別是46214 與42*(詳見21312 放大倍數分析與計算)由于INA332 是串聯型儀表放大器,其內部結構決定信號正常放大要求共模信號與參考電壓有對應的輸入關系,如圖7 所示。
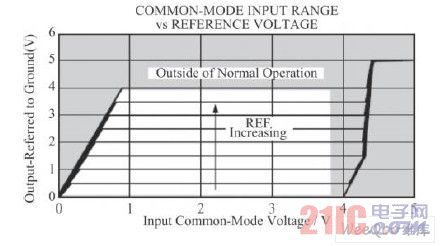
圖7 共模輸入信號與參考電壓關系表。
必須依據參考電壓輸入一定的共模信號才能使INA332 正常工作。
電壓參考源REF3212 輸出1125 V。整個系統供電為313 V ,傳感器輸出的共模電壓為313/ 2 =1165 V ,符合上述要求,且AD 采用215 V 參考,如此可使輸入信號獲得最大動態范圍。傳感器電路帶有置位/ 復位按鍵。按鍵產生高電流脈沖進入置位/復位帶,可以校準傳感器靈敏度。
2.4.3 MSP430 單片機及周邊電路
在MSP430 周邊電路中, Y1 用鐘表晶振321768 kHz 作為低速時鐘源,Y2 用8 MHz 作為高速時鐘源XT2CL K。P610/ A0 和P610/ A0 用其第二功能,與INA332 的輸出相連接,作為模數轉換信號輸入口。部分P2 和部分P3 口作為與LCD 的通信端口,另一部分P3 口和部分P4 口控制8 個L ED指示燈。P112 - P115 口作為按鍵中斷的申請出入端口 。
2.5 軟件設計:
2.5.1 軟件設計特點與算法描述:
我們通過算法對數字量進行處理,消除干擾,得到了誤差低于1°的方向角數值,以圖形和數字兩種形式顯示。磁偏角設置功能使方向角指示更加準確。信息鎖定功能方便了用戶的使用。
(1) 數據的形式:
理論 以X , Y 為坐標的點集是以原點為圓心的圓。
實際 以X , Y 為坐標的點集基本形成一個原點偏離圓心的橢圓,原因是兩軸靈敏度及放大倍數不一致使他們變化范圍不同,而參考源與兩軸不同的失調電壓使橢圓圓心偏離原點。
(2) 算法工作。
①軟件濾波,減小噪聲造成的誤差②將兩軸數據線性變換為符合正切函數的點,并作局部調整,最后確定角。
2.5.2 主程序
主程序完成對各模塊初始化程序的調用并進入低功耗模式。其程序流程圖如圖8 所示。
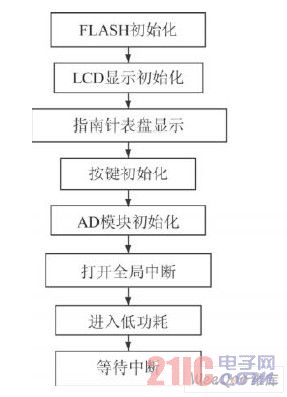
圖8 主程序流程圖。
本系統使用默認的時鐘設置,即DCO 振蕩器作為MCL K(供CPU 工作) 與L FXT1CL K 低頻時鐘源作為ACL K(供定時器,ADC 工作) ,為整個系統利用低功耗模式做準備。在之后的工作中,各中斷源按需向CPU 申請退出低功耗模式,完成工作后,CPU 返回低功耗模式。
2.5.3 AD 轉換及方向確定
該部分程序完成運放輸出信號的AD 轉換、所得數據的分析處理及調用LCD 顯示函數完成方向指示的刷新。
AD 模塊函數分ADC 初始化函數ADC12_ Init和AD 中斷函數ADC12_ISR(包括方向的決定) 。
本系統使用定時器A 觸發AD 模塊進行轉換。
ADC 初始化函數主要完成了定時器A 及AD 模塊的初始化工作。定時器A 的初始化工作設置了其計數周期,即設定了AD 的工作周期。AD 模塊的初始化工作中選定了內部215 V 參考源,并設置在完成一次序列轉換(兩個通道的轉換) 后申請AD 中斷。同時,定時器A 與ADC 同時選擇ACL K 作為工作時鐘,準備低功耗工作。
AD 中斷函數首先對信號進行平均值濾波(對無規律的噪聲尤其實用) 。完成濾波后對數據進行線性變換并局部修正,由angle = arctan ( Y_axis/ X_axis) 得到以傳感器為正方向的角度值。最后加以磁偏角和液晶與傳感器夾角補償,實際方向角度輸出到LCD 顯示。
2.5.4 按鍵處理及磁偏角設置
該部分程序完成按鍵操作以實現磁偏角設置與鎖定功能。該部分程序使用狀態變量KeyStatus 來對按鍵的不同功能組合進行分類,分別有主界面狀態、磁偏角設置狀態及鎖定狀態。
按鍵初始化函數設置了初始按鍵功能為主界面狀態。按鍵中斷響應函數首先對按鍵進行消抖確認(使用定時器B 完成其中的延時) ,然后調用按鍵功能執行函數,并由其返回參數改變當前按鍵功能狀態。按鍵功能執行函數分按鍵分狀態給予具體功能響應,具體功能見程序流程圖。其中磁偏角設置狀態下,確定功能還將把新的磁偏角寫入FLASH ;鎖定功能將關閉定時器A 和ADC ,即系統暫停信號轉換。
2.5.5 LCD 的驅動:
該部分為LCD 的定位、寫入、清除,及中英字符顯示等功能的驅動程序,這里不做詳細展開。
2.5.6 LCD 的系統顯示:
該部分程序完成指南針的圖形顯示、方向的文字與數值顯示,以及磁偏角設置界面的顯示。
直接涉及界面顯示的函數有顯示指南針表盤函數LCD_disp_Panel ,指南針更新顯示函數LCD_up2date ,以及與磁偏角設置功能相關的顯示函數Enter_Cipianjiao 、Exit_Cipianjiao 、Change_Cipianjiao 。
3 系統測試
3.1 測試方案
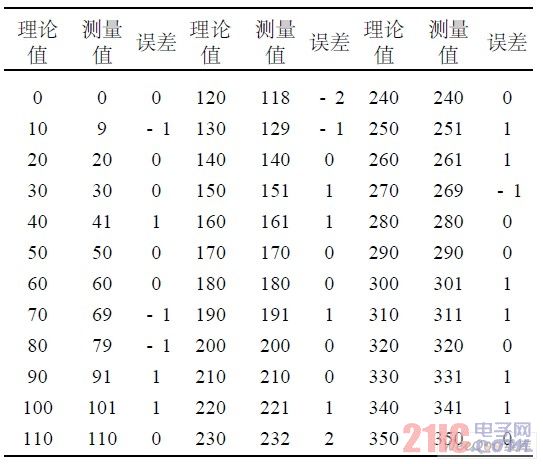
關于方向精度的測量,我們將方向指示系統每轉10°做一次測量,將其理論值與實際測量值記錄,并加以比較。
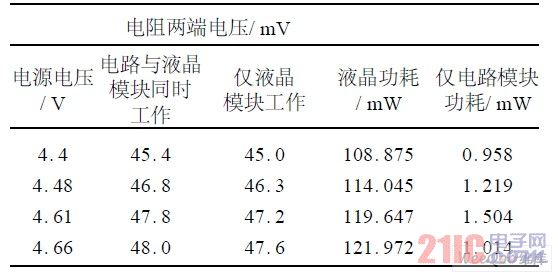
關于電路功耗測量,我們在電源輸入端串聯一小電阻,通過測量電阻兩端電壓,經公式計算得到電路輸入總電流,即可求得電路總功耗。在液晶鎖定模式(僅液晶工作,其余電路不工作) 下,用同樣的方法求得其總功率,兩者之差即為我們電路模塊(液晶不工作情況下) 的功耗。
3.2 測試數據與儀器
3.2.1 方向精度
實際測得值與理論值見表2 所示。
表2 數據測試表
31212 功耗:
經過測量所得的電路模塊功耗見表3 。
表3 功耗測試表
4 設計總結
本設計通過合理選用元件及優化的軟硬件設計,使我們制作的方向指示系統具有顯著的低功耗、低成本、便攜式、高精度的特點。
在設計制作過程中,我們對電路的每一部分都進行了嚴密的分析論證和參數計算,并經過長時間的調試逐步優化我們的設計。積累總結了許多硬件電路方面的經驗。一些算法的巧妙編寫也使我們的設計達到了事半功倍的效果。我們將繼續對此項目作進一步的探索,使方向指示系統的功能更加完善,應用領域更加廣泛。