
0 引言
倒立擺是日常生活中許多重心在上、支點在下的控制問題的抽象模型,本身是一種自然不穩定體,它在控制過程中能有效地反映控制中許多抽象而關鍵的問題,如系統的非線性、可控性、魯棒性等問題。對倒立擺系統的控制就是使小車以及擺桿盡快地達到預期的平衡位置,而且還要使它們不會有太強的振蕩幅度、速度以及角速度,當倒立擺系統達到期望位置后,系統能克服一定范圍的擾動而保持平衡。作為一種控制裝置,它具有形象直觀、結構簡單、便于模擬實現多種不同控制方法的特點,作為一個被控對象它是一個高階次、非線性、多變量、強耦合、不穩定的快速系統,只有采取行之有效的方法才能使它的穩定效果明了,因此對倒立擺的研究也成為控制理論中經久不衰的研究課題。
1 一級倒立擺系統的數學模型
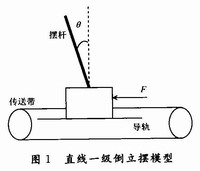
對于倒立擺系統來說,如果忽略了空氣阻力和各種摩擦之后,可將直線一級倒立擺系統抽象成沿著光滑導軌運動的小車和通過軸承連接的勻質擺桿組成,如圖1所示。其中,小車的質量M=1.32 kg,擺桿質量m=0.07 kg,擺桿質心到轉動軸心距離l=0.2 m,擺桿與垂直向下方向的夾角為θ,小車滑動摩擦系數,fc=0.1。
倒立擺控制系統數學模型的建立方法一般有利用牛頓力學的分析方法和分析力學中的拉格朗日方程建模兩種。本文采用的是拉格朗日方程建模。
一級倒立擺系統的拉格朗日方程應為:
![]()
式中:L是拉格朗日算子;V是系統動能;G是系統勢能。
![]()
式中:D是系統耗散能;fi為系統在第i個廣義坐標上的外力。
一級倒立擺系統的總動能為:

一級倒立擺系統有4個狀態變量,分別是![]()
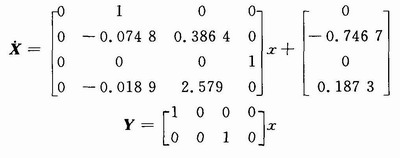
![]() ,根據式(7)寫出系統狀態方程,并在平衡點處進行線性化處理,得到系統的狀態空間模型如下:
,根據式(7)寫出系統狀態方程,并在平衡點處進行線性化處理,得到系統的狀態空間模型如下:
2 倒立擺性能分析
系統的能控性是控制器設計的前提,所以在設計前對系統進行能控性分析,根據能控性矩陣T0=[B,AB,A2B,A3B],利用Matlab中的rank命令,可以得出rank(T0)=4。由此可知,系統是完全可控的,因此可以對系統進行控制器的設計,使系統穩定。
3 LQR控制器的設計
3.1 LQR控制器原理
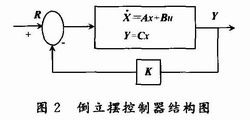
線性二次型調節器的控制對象是線性系統,這個線性系統必須是狀態空間的形式,即:![]() ,Y=Cx+Du。通過確定最佳控制量U*=R-1BTPX=-KX的矩陣K,使性能指標
,Y=Cx+Du。通過確定最佳控制量U*=R-1BTPX=-KX的矩陣K,使性能指標![]() 的值極小。其中,加權矩陣Q和R是用來平衡狀態變量和輸入變量的權重;P是Riccati方程的解。這時求解Riccati代數方程:
的值極小。其中,加權矩陣Q和R是用來平衡狀態變量和輸入變量的權重;P是Riccati方程的解。這時求解Riccati代數方程:
![]()
就可獲得P值以及最優反饋增益矩陣K值:
![]()
LQR用于單級擺的原理圖如圖2所示。
3.2 加權矩陣Q和R的選擇
在選取Q和R時,主要從以下幾方面考慮:
(1)Q是正定或半正定矩陣,R是正定矩陣。
(2)Q陣中對角線上的元素與狀態變量一一對應,數值越大,則表示該狀態變量對系統的影響越顯著。
(3)加權矩陣R不要過小,否則會導致控制量的增大。控制量太大會超過系統執行機構的能力,R陣也不要太大,否則控制作用太小會影響控制性能。
綜合以上考慮,取Q=diag([100,100,100,100]),R=1,利用Matlab提供的LQR函數,可得控制器的增益矩陣:
K=[-10.000 0 -24.140 8 250.036 0 158.553 3]
3.3 利用遺傳算法優化Q陣
遺傳算法是一種基于生物界中的自然選擇原理和自然遺傳機制的隨機搜索算法,它模擬了生物界中的生命進化機制,并用在人工系統中實現特定目標的優化。
采用遺傳算法優化加權陣Q的具體步驟如下:
(1)選擇編碼策略,把參數轉換成染色體結構空間。
(2)確定解碼方法。
(3)確定優化目標函數的類型及數學描述形式,在LQR最優控制中取目標函數J,J=trace(P)。
(4)設計遺傳算子。
(5)確定遺傳策略。設群體大小為80,最大迭代次數為200,交叉概率選為0.9,變異概率選為0.01,并隨機產生初始群體。
(6)計算群體中的個體或染色體解碼后的適應值。在本設計中將適應值取為目標函數值的倒數,即f=1/J。
(7)進行遺傳算法搜索過程,即采用隨機采樣的方法選擇個體,通過交叉和變異產生新個體,再計算新個體的目標函數值J’。
(8)判斷群體性能是否滿足指標或者是否完成迭代次數,若不滿足則重復步驟(7)。
通過上述算法即可確定使目標函數值最小加權矩陣Q中待優化元素的值,從而確定反饋控制規律的向量K。
4 仿真結果及分析
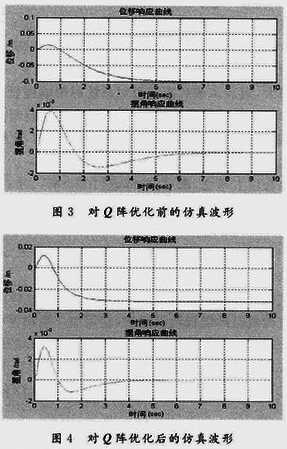
取Q=diag([100,100,100,100]),R=1時,得到的一級倒立擺仿真波形如圖3所示。由圖可見,小車經過5.2 s達到平衡,而擺角經過6.5 s達到平衡。對Q陣優化后系統響應超調量減少,響應速度加快,調節時間減少,系統的靜態特性和動態特性都得到改善,如圖4所示。
5 結語
本文利用拉格朗日方程建立了直線一級倒立擺控制系統的數學模型,在此基礎上分析了該系統的性能,并利用LQR控制器進行控制。結果表明,LQR控制器對該系統具有良好的控制作用。