
1 引 言
探地雷達( ground penetrating radar,GPR)是一種新型的電磁探測設備,它具有快速、簡便的對淺層目標和結構進行無損探測的特點,也是目前分辨率、效率最高的地下目標探測設備之一,因此被廣泛的應用于城建、交通、地質、考古、國防等部門。在探地雷達的應用中,能否準確、高效地采集數據是探地雷達系統實用性和可靠性的判據之一。數據采集的準確性直接關系到探測目標的準確性和雷達數據的進一步處理工作;采集數據的速度關系到系統能否實現實時顯示。所以,當雷達設備將采集數據傳回主機時,就需要選擇一種接口來實現數據準確、高速的傳輸。
傳統的數據采集系統的數據傳輸接口在低速時常采用標準串行口或并行口,高速時一般采用PCI總線接口。它們存在如下缺點:雖然標準串行口或并行口應用開發比較簡單,但是數據傳輸速率較低;PCI總線盡管數據傳輸速率比較快,但是硬件設計和驅動開發難度較大,PC I卡的尺寸面積限制了I/O接口的擴展;同時,這三者都不支持即插即用的功能。而USB接口規范1. 1中的12Mbp s的傳輸速率已經可以滿足探地雷達數據采集系統的使用需求,其接口簡單、便攜,支持即插即用的優點又在很大程度上簡化了系統的硬件設備,提高了雷達設備的可移動性。正是基于USB接口的這些優點,設計了基于USB接口的探地雷達數據采集系統,并開發了配套的應用軟件,實現了探地雷達數據的采集、傳輸和實時顯示。
2 系統組成與工作原理
2. 1 系統組成
探地雷達數據采集系統由兩部分組成:計算機和數據采集卡。計算機作為采集系統的主控設備,實現對系統的控制和數據處理等功能;數據采集卡由模擬信號放大器、數控濾波器、時控增益放大器、高精度AD變換電路、F IFO、FT245 USB接口電路和時序控制電路組成,主要完成對取樣電路輸出信號的放大、濾波、采集等任務,并將采集數據通過USB接口傳輸到計算機內存中,供計算機處理和實時顯示。系統組成框圖如圖1所示。
數據采集系統采用F IFO 設計數據傳送通道,大大簡化了系統的硬件電路和控制時序。在進行數據采集的同時,控制邏輯還將存儲在RAM中的增益曲線數據周期性的送入DAC中,以實現時控增益放大。在數據采集卡中還設計了一個RS - 232 控制器,用于接收外部定位裝置發送的定位信息。在探地雷達進行移動探測時,這個定位信息用于標示目標的地理位置。
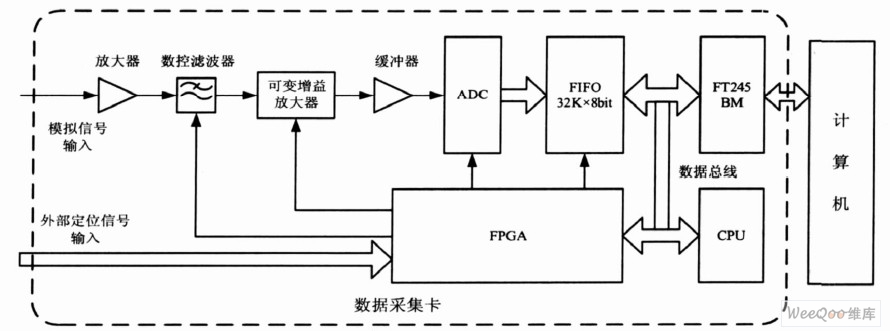
圖1 探地雷達數據采集系統組成框圖
2. 2 工作原理
探地雷達數據采集系統在工作時,首先通過打開計算機應用軟件將雷達設備啟動,然后將工作參數傳送給數據采集卡,完成對雷達各項參數的控制。
命令被響應后,雷達開始正常工作。采集卡將采集到的數據經過采集控制和傳輸控制后傳送給計算機。
數據采集控制:數據采集卡根據主機設置的參數采集雷達信號。首先將模擬信號進行預處理,預處理包括濾波處理和增益控制等,以去除模擬信號中的噪聲,使模擬信號的幅度適于進行AD 轉換。
然后進行AD 轉換,對模擬信號采樣,得到數字信號。數據采集卡在接收探地雷達傳來的模擬視頻信號的同時,還接收幀同步信號。數據采集卡將轉換得到的A - scan (A - scan:探地雷達在一個測量位置探測獲取的一維時域波形圖)數據與幀同步數據混合,然后存入FIFO。
數據傳輸控制:計算機通過USB接口對數據采集卡進行訪問,并讀取F IFO 中的數據。計算機對數據采集卡的訪問是通過查詢方式完成的。數據采集卡內置的F IFO容量設計為32K ×9bit,如果計算機沒有及時讀走FIFO內的數據,F IFO就會出現溢出錯誤。所以查詢的時間間隔要滿足在該間隔內采集的數據不能大于F IFO的容量;另一方面,查詢間隔太短,會加大計算機系統的負擔,影響計算機進行數據處理的速度,所以要選取適當的查詢間隔。以數據采集卡的最快采集速度為例進行計算: 每個scan的采樣點數為1024,采樣速率為512 scan / s,每一點的數據長度為2字節。這樣在1 s內采集數據的大小為1024 ×2B ×512 = 1MB。在這樣的采樣率下,經32ms采集的數據就可將F IFO 裝滿,考慮到計算機系統的其它因素可能導致數據傳輸的阻礙,將查詢間隔設為20ms。此時既可以滿足數據傳輸的可靠性,又可節約計算機系統的資源。
3 系統的設計與實現
3. 1 硬件設計
與一般的通用數據采集卡不同,探地雷達數據采集系統的數據采集卡不僅要完成數據的采集,還需要根據探地雷達信號的特點,對模擬信號進行相應的預處理工作。
由于探測越深的目標,探地雷達接收的回波信號越小。為了提高對深層目標的分辨率,要采用時控增益放大器對取樣電路輸出的信號進行放大。對淺層目標反射的較強的回波信號,放大器具有較小的增益;對深層目標反射的較弱的回波信號,放大器具有較大的增益。由于探地雷達對地下目標進行重復掃描,所以放大器的增益曲線是與掃描頻率同步的周期信號,也就是時間的函數,所以稱為時控增益放大器。時控增益放大器的增益曲線通過計算機軟件進行調節,可以為任意的曲線。這樣就給使用者帶來了很大的靈活性,實驗中可以對感興趣回波區域的放大增益進行調節以使目標更加明顯。時控增益放大器由壓控增益放大器、DAC和FPGA內部的RAM及控制電路組成。
由于不同的采樣點數和掃描速度使得探地雷達接收機輸出信號的有效帶寬不同,為了提高信噪比,設計了模擬可控低通濾波以實現對不同帶寬信號的低通濾波。該部分采用集成的開關電容濾波器設計,同時在FPGA中設計控制電路對該濾波器進行控制。最終實現了一個截止頻率為0. 1 - 50KHz可變、8階巴特沃思低通濾波器。
在USB芯片的選取上,選擇了FTD I公司推出的FT245BM芯片。該芯片功能強大,傳輸速率快,能夠實現USB協議與并行I/O協議之間的轉換,并支持USB1. 1 及USB2. 0 規范,數據傳輸速率可達1MB /S。不論從芯片本身的功能,還是從系統開發的角度出發,該芯片都是探地雷達數據采集系統USB接口設計的理想選擇。FT245BM片內128 字節的接收F IFO和384字節的發送F IFO使得芯片可以實現高速數據吞吐。當USB 外設向主機傳輸數據時,只需在芯片發送器的狀態位為空時向設備寫入一個字節寬度即可。如果發送FIFO 已滿,設備將發送器的狀態位設置為滿以禁止數據寫入,直到F IFO中有部分數據通過USB接口傳輸出去。當主機通過USB向外設傳輸數據時,設備將首先判斷芯片接收器的狀態位是否為滿以確定是否可以接收數據,然后外設從主機讀取數據直到接收器的狀態位為滿,表明已沒有可以讀取的數據。
3. 2 驅動程序設計
W indows系統下的USB驅動包括三層,從高到低依次是:USB客戶端設備驅動(USB Client DeviceDriver) 、USB總線驅動(USB Hub (Bus) Driver) 、主機控制器驅動(Host ControllerDriver)。后兩者由Windows系統提供,用戶只需要開發USB 客戶端設備驅動程序,FTD I公司提供了一個通用的驅動程序(General Purpose Driver) ,即FTD2XX. SYS。為了增強系統的通用性和可移植性,可以將設備驅動程序( FTD2XX. SYS)進行動態鏈接庫函數封裝,得到動態鏈接庫FTD2XX. DLL,從而可以通過動態鏈接庫直接訪問驅動程序。驅動程序的結構如圖2所示。
實現動態鏈接庫對驅動程序的訪問,首先調用FTD I公司提供的接口函數FT_Open ( )打開設備并獲得驅動程序的句柄,然后調用FT_GetStatus ( )獲得設備接收數據的長度、傳輸數據的長度和設備的當前狀態,從而通過驅動程序得到設備輸出緩沖區的信息。進而調用函數FT_Read ( )和FT_W rite ( )實現對設備的讀寫。當應用軟件退出時,用FT_Close ( )關閉設備。
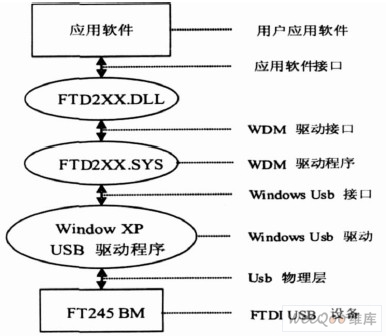
圖2 驅動程序結構圖。
3. 3 軟件程序設計
在本系統中,應用軟件主要由動態鏈接庫和應用程序兩部分組成。動態鏈接庫負責與USB 設備驅動程序通信,響應應用程序的各種請求;應用程序則以定時查詢的方式將采集數據讀入計算機事先開辟的大容量內存緩沖區,同時從緩沖區讀出數據實時顯示,采集結束后再將內存緩沖區的數據存盤。
系統的應用軟件用于探地雷達參數設置、數據采集和實時顯示。應用程序主要包括參數設置和數據錄取兩大部分。參數設置部分主要完成對雷達設備的控制和雷達參數的設置,這部分的操作都集中在軟件的設置界面進行操作;數據錄取部分完成對雷達采集數據的實時顯示、存盤和數據回放,這部分的操作都集中在軟件的錄取界面進行操作,其框架結構如圖3所示。
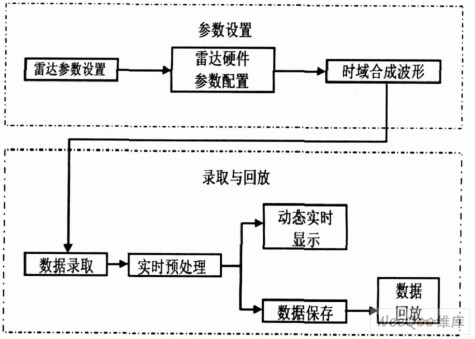
圖3 應用軟件框架結構圖
系統進入正常工作狀態后,硬件設備會將采集的數據源源不斷地傳回主機事先開辟的緩存內,接著對數據進行預處理,進而檢測每一幀數據的幀頭,將檢測到的每一幀數據存放入另一塊緩存,進行數據修復,用于系統的實時顯示和存儲操作,并將事先開辟的緩存做清空處理,準備接收新的數據。應用程序流程圖如圖4所示。
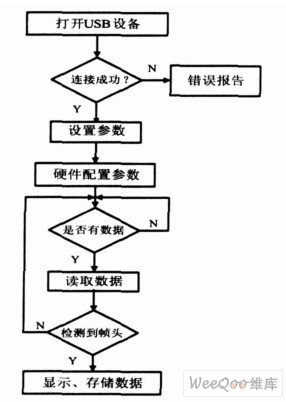
圖4 應用程序流程圖
4 實驗結果與分析
考慮到探地雷達工作的環境和使用的便利性,本系統的計算機采用帶觸摸屏的便攜式工控計算機,數據采集卡與工控機集成在一個機殼內。通過綜合電纜與探地雷達發射、接收機連接后就組成了完整的探地雷達系統。該系統具有小型化、便攜化、低功耗的特點。
為了驗證數據采集系統的功能和可靠性,進行了如下實驗: 雷達系統對一個距離雷達天線為0. 9m、面積為0. 2m ×0. 3m 的金屬板目標進行探測。雷達天線正對目標平面,并平行于金屬板平面以1m / s的速度沿直線移動,對目標區域進行探測。
實驗參數設置:采樣點數為1024點,掃描速度為64 scan / s,濾波器截止頻率為50KHz,相對增益控制為0dB,波形平均次數為8次。實驗的參數設置界面如圖5所示。圖中顯示了一道A - scan波形。
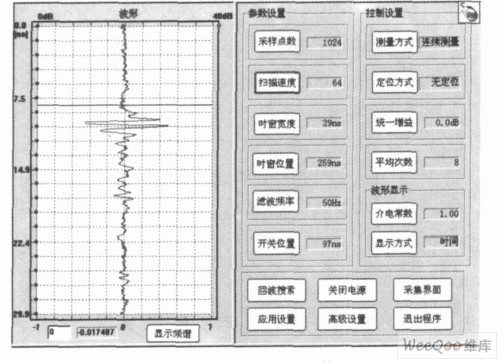
圖5 實驗參數設置界面
通過設置界面修改增益曲線,濾波器截止頻率等參數,A - scan波形會發生相應的變化。操作者要根據探測工作的具體情況,合理設置系統參數,以得到較好的探測結果。
設置完畢后,點擊“采集界面”將應用軟件切換至數據采集錄取界面,系統開始采集并錄取數據,采集界面如圖6所示。
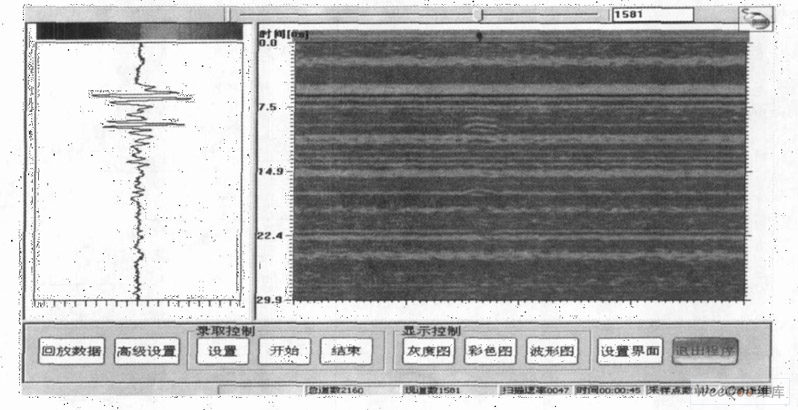
圖6 實驗數據采集結果
由圖6中右側的彩色堆積圖可以看出,在時間坐標為6. 5ns處的色帶即為回波的直耦波堆積圖,直耦波位置即可認為是天線位置。在時間坐標為9. 5ns處的圖像中部有一明顯的雙曲線波形,即由地下金屬板的回波形成的二維堆積圖。根據電磁波在空氣中的傳播速度為3 ×108m / s,可得出目標與天線的距離為( 0. 95ns - 6. 5ns) ×3 ×108m / s =0. 9m。圖6左側顯示出雷達經過正對目標區域時采集的一維時域波形,在時間坐標相應位置可以看到直耦波和目標回波。實驗結果驗證了數據采集系統功能的完整性。
在實驗采集數據的過程中,系統工作穩定,可靠,且能實現實時顯示,這些都為探地雷達的后續數據處理工作奠定了良好基礎。
通過實驗結果可以看出,本數據采集系統在應用于探地雷達工作時,可以有效地完成對雷達模擬視頻信號的預處理和采集,并可實現雷達參數設置和數據的實時顯示和存儲工作,使探地實驗數據的獲取更加穩定,可靠,直觀。另外,系統的小型化、便攜化、低功耗設計,使系統更加適用于外場實驗。所以,此系統完全適用于探地雷達的工程應用。
5 結束語
實踐證明,使用FT245BM芯片開發USB 接口具有設計簡單、價格低廉、開發周期短的特點。再加上FTD I公司提供的驅動程序支持,從而使應用軟件的可移植性大大提高。通過外場數據采集實驗表明,該系統完全滿足探地雷達對數據采集系統的性能要求,能夠做到大容量高速連續采集且穩定可靠,接收的數據能夠實現實時顯示,并真實地反映出探測區域的目標特性。