
摘要:介紹了一種基于MEMS加速度傳感器的自動校準平臺的設計方案。從數學模型入手,推導了傾角測量算法并設計了調平控制方案。在電機控制環節加入改進后的PID算法,解決了輸出突變導致系統性能下降的問題。快慢檔的設定使系統在縮短調平時間的同時兼顧精度的要求。實驗結果表明,該系統工作穩定,可用于一般調平場合。
關鍵詞:MXC62025G;自動調平;PID控制;抗干擾
引言
現代測控系統在正常工作時往往需要一個基準平臺,在這樣的客觀需求下調平技術應運而生。目前該技術已廣泛應用于各種工業領域,如起重機支架、鉆井平臺、火炮底座、衛星天線基座、導彈發射平臺等。傳統的手動調平方式費時費力,嚴重影響了平臺上設備機動性能的發揮。自動校準平臺的研制彌補了手動方式的不足,并且在效率、精度、可靠性等方面都優于手動校準平臺。本文介紹了一種能夠實時監控平臺狀況并通過步進電機進行相應調節的自動校準平臺。
1 傾角測量原理
MXC62025G是美新(Memsic)公司推出的一款基于MEMS技術的雙軸加速度傳感器,集成了片上信號處理和I2C總線模塊,無需外接A/D轉換器便可以與微處理器通信。該傳感器可以同時測量恒定和變化的加速度,測量范圍為-2~+2 g,在25℃室溫、3 V工作電壓的條件下,其靈敏度可達512計數點/g。其內部結構如圖1所示,硅片中心有一個熱源,四周等間距地放置了4個熱電堆。當硅片水平靜止時,熱源周圍的溫度梯度是均勻的,所以4個熱電堆的溫度相同,輸出電壓相同。當硅片傾斜或在某一方向上有加速度時,熱源周圍的溫度梯度發生擾動,因而輸出電壓發生變化。

由于傳感器的輸出不能為負,因而需要減去一個偏移量來區分正負,此處取輸出值的中值,即最大值與最小值之和的一半。另外,傳感器的輸出是加載在兩個測量軸上的重力加速度的分量,要輸出傾角值還需進行數據處理。假設X軸向的傾角為α,Y軸向的傾角為β,則輸出值與傾角大小存在以下關系:
![]()
即

當傾角較小時,軸向加速度與傾角之間近似為線性關系,故有:![]() ,K值選取與傾角誤差之間的關系如表1所列。
,K值選取與傾角誤差之間的關系如表1所列。

不難看出,測量范圍與測量精度是一對矛盾。為了提高系統的精度,應當盡量減小平臺調節的幅度,所以自動校準平臺應當先大致擺放到水平位置再按啟動開關。
2 平臺調平原理
目前工程上4支點或更多支點的調平系統應用廣泛,這主要是從穩定性角度考慮的,但超過3根支腳后必然要面臨超定位的問題。由于虛腿的出現,平臺上的設備工作時不能保證每根支腳上的受力具有重復性,從而導致支架形變,影響調平精度。而在3點調平結構中,各支腳受力均勻,只要支腳設計得當就可以保證較高的穩定性,調平控制模型如圖2所示。
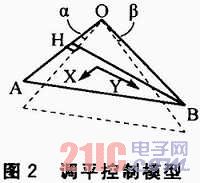
圖中的3個頂點O、A、B分別代表3個支撐軸,為了使基座能夠適用于不同的環境,設定支腳O的高度為手動可調。傳感器在安裝時需保證其X軸與OA邊平行,Y軸與OA上的高BH平行。當固定了O點的高度后,調節A、B兩處,使平臺達到水平。為了便于實驗,將模型進一步理想化,使點H與O重合。平臺調平的實質是將兩條相交的直線分別調到水平。
假設平臺為剛性結構,加速度傳感器的精度為常數,且在X與Y兩個方向上的傾角分別為α和β,兩軸之間的夾角為θ,則整個平臺的水平度γ可表示為:
![]()
根據上面的公式,只有當兩軸的夾角為90°時,系統在調平過程中才沒有耦合,水平度θ才有最小值。
若兩軸上的控制精度為±δ,則系統調平的水平誤差![]() 。由于選擇的是雙軸加速度傳感器,它的兩個測量軸相互垂直,即θ=90°,故水平調節誤差
。由于選擇的是雙軸加速度傳感器,它的兩個測量軸相互垂直,即θ=90°,故水平調節誤差![]() 。即如果整個平臺的水平度要求為0.1°,則X軸、Y軸上的控制精度就是
。即如果整個平臺的水平度要求為0.1°,則X軸、Y軸上的控制精度就是。
3 系統硬件設計
3.1 傳感器硬件連接
加速度傳感器以I2C總線標準輸出數據,由于本身即為數字量,因而節省了模/數轉換所需的硬件,但I2C接口為開漏輸出結構,必須接上拉電阻后才能輸出高電平。其硬件連接如圖3所示,8腳上的電源電壓需穩定在2.7~3.6 V,5腳上的I2C輔助電壓標稱值為1.8 V,但只要低于8腳上的電壓值亦可正常工作,電源與地之間通過一個0.1μF電容濾波。由于采用的單片機STC10F08沒有I2C接口,故將其通用I/0接口P1.0和P1.1模擬成I2C接口的SDA和SCL。

3.2 支腳的設計
當前廣泛使用的支腳類型包括液壓式和機械式兩種。液壓型的支腳雖然輸出功率較大,但是也存在明顯的缺點:液壓油本身可壓縮,液壓油粘滯系數隨溫度變化,液體容易泄漏,液壓油可燃,設備不能自鎖,檢修困難等。機械支腳雖然慣性較大,但適應性強并可以實現機械鎖緊。考慮到現場環境可能比較惡劣,本文采用了機械式調平方法,系統結構示意圖如圖4所示。

將電機軸設計為中空的螺母式結構,支腳就是旋人其中的螺桿。平臺的支撐架由兩部分組成:電機和臺面構成的整體、旋在電機軸內的螺桿。螺母及其相連的內筒固定不動而螺桿旋轉,帶動電機以及上面的平臺一起作直線運動。這種螺旋傳動的方式將旋轉運動轉化為直線運動,從而實現平臺的升降,并且能在任何高度自鎖。
如圖4所示,單片機收到加速度傳感器送來的傾角信息后,在實時顯示的同時按照預先設定的控制算法,控制步進電機的轉動。電機軸的正反轉動轉化為支撐軸的上升和下降,從而實現對傾斜平面的調平。
3.3 系統軟件設計
自動校準平臺的程序流程如圖5所示,其中最主要的部分是角度信號的采集、數據的進一步處理以及電機的自動控制。信號采集環節主要是完成傳感器與單片機之間的I2C串口通信;數據處理環節包括正負角度值修正、傳感器輸出的線性化處理以及軟件濾波;電機控制環節包括快慢檔調節、零點鎖定和PID控制。
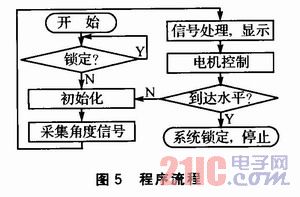
其中,電機控制與平臺調平直接相關。系統根據檢測到的傾角大小,在不同的傾角范圍采取不同的調平速度和調平精度。傾角較大時調平精度較粗,電機一次轉動的步數較多,支撐軸的伸出速度越快,調平速度就越快;傾角小于低速閾值時,電機轉動頻率降低,支撐軸的伸出速度變慢,使平臺形變和支腿伸出速度過快所帶來的不良影響得以減小,從而在整體上兼顧了調平速度和調平精度。
從實際應用出發,考慮到當基座調平完成后,平臺上的設備便開始工作,如果該設備在運行過程中產生振動,則必然導致基座不穩定。若不加任何防范措施,其結果就是平臺上設備工作的同時基座繼續調平,這對于設備的正常運行是非常不利的。特別當其應用于吊車、火炮等有較高穩定性要求的調平場合時,上述情況是非常危險的。因此,在原先的基礎上增設了調平完成后的自鎖定功能,以及手動解鎖按鈕。
整個調平過程是一個離散化的動態趨近過程。在系統跟蹤傾角狀態的每個周期,平臺都逐步逼近水平位置,直至與水平面的差別小于停機閾值。此時電機停轉,平臺鎖定,系統默認一次校準任務完成。在下一次基座調平任務來臨之前,需要手動操作解鎖按鈕,以喚醒系統工作。從系統動態調平的思想中可以看出,兩臺電機的擺放位置并不是固定的,只要3個支撐點不共線,平臺就可以實現自動調平。
為使系統更加穩定、準確的完成調平工作,采用了基于PID的反饋控制算法。傳統的PID控制結構如圖6所示,虛線框內是PID控制器,R(s)為輸入量,C(s)表示復雜系統輸出,B(s)是反饋量,控制偏差信號E(s)=R(s)-B(s),G。(s)表示被控過程,D(s)為外界干擾,N(s)是傳感器噪聲。

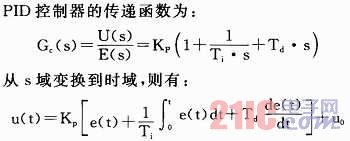
其中,Kp、Tp、Td分別為比例、積分、微分環節的系數,uo為初始狀態。
但是,系統輸入環節中存在大量的脈沖信號,取一小段時間片來看,可以認為有大量階躍信號。由于在PID控制環節存在導數項,使得輸出信號中包含沖擊函數,而輸出突變對于系統控制性能的影響是不容忽視的。為了解決輸出突變導致系統控制性能下降的問題,在前向通路中僅保留積分環節,而把比例和微分環節移入反饋通路中,其結構框圖如圖7所示。由于輸入信號僅出現在積分控制環節中,PID控制器的輸出突變問題得以解決。

圖7中的控制器輸出信號U(s)可表示為:

為了便于計算機采樣,對上式進行離散化處理,采樣周期為T,采樣序列編號從0到N,積分變成求和,微分變為增量,從而有以下PID控制模型:

4 抗干擾設計
考慮到現場電器設備的啟動和關閉而產生的電磁干擾、熱源的影響以及平臺的振動,必須對校準平臺進行抗干擾設計。
4.1 硬件抗干擾
如圖3所示,在電源與地之間并聯0.1μF的濾波電容,以抑制開關電源的噪聲。傳感器金屬外殼接地,同時其下方的電路板作覆銅處理,以抑制電磁干擾。為了避免外界對傳感器內部熱場的擾動,電機、驅動器、電源電路等可能的熱源都設計安放在距離傳感器較遠的區域。支承軸下端安裝減震墊來削弱調平過程中平臺振動對傳感器的影響。
4.2 軟件抗干擾
對信號進行低通濾波,降低系統帶寬,能夠降低傳感器輸出噪聲,提高系統的信噪比。同時采用冒泡法對一次性接收到的11組數據進行排序,取中間的5組數據再做滑動平均,可以有效抑制隨機噪聲。針對平臺振動對傳感器的干擾,電機在單次基座調整后延時一段時間再進行下一次轉動。
5 實驗與分析
通過模擬各種傾斜姿態,對校準平臺的性能進行了測試。當平臺傾角較大時,根據先前設定的控制算法,為使基座盡快達到水平,電機快速轉動,系統開始粗調,此時平臺出現短時間顫動。特別是當電機每次轉動超過30步時,現象較為明顯,導致顯示器中的傾角讀數小幅跳變。修改電機控制程序使其每次最大轉動的步數不超過10步,并且間隔時間略微延長,振動現象得以緩解。當傾角小于5°后,系統自動切換到細調模式,電機轉速下降,平臺穩定無振動,直至到達水平位置后系統鎖定。表2中列舉了不同傾角下的調平時間,可以看出,當平臺傾角小于20°時,系統調平時間不超過40 s。

結語
針對多點調平系統的不足,設計了電機式3點自動校準平臺,簡化了控制模型。在分析了調平過程中可能遇到的干擾因素后,采用相應的軟硬件抑制方法,提高了系統適應復雜工況的能力。在電機控制程序中加入改進后的PID算法,將比例和微分環節移人反饋通路,解決了輸出突變導致系統控制性能下降的問題。粗調與細調模式的自動切換,兼顧了速度和精度兩方面的要求。本方案調平精度約0.1°,調平時間不超過40 s,具有結構簡單、穩定性高等優點,可以作為一般基座調平場合的技術參考。