
摘要:出租車計費系統大多利用單片機進行控制,較易被改裝,且故障率較高。針對這一問題,設計了一種基于FPGA的出租車計費系統,可模擬汽車行駛、暫停等待,停止等過程,并可同時顯示金額、乘車總路程。設計采用層次化設計方法,用VHDL語言進行編程,開發軟件為MAX+plusⅡ。經測試,波形與仿真結果都滿足設計要求。
關鍵詞:出租車計費系統;VHDL語言;MAX+PLUSⅡ;FPGA
隨著城市化水平的提高和人民生活水平的改善,出租車的服務顯得越來越重要。因此出租車計費器也就應運而生了。出租車計費器是一種專用的計量儀器,它安裝在出租車上,指示出載客路程數,以及乘客應付費用的總數。
出租車計價系統較多的是利用單片機進行控制,但較易被私自改裝,且故障率相對較高,且不易升級;而FPGA具有高密度、可編程及有強大的軟件支持等特點,所以設計的產品具有功能強、可靠性高、易于修改等特點。
本文正是基于FPGA,設計了一種出租車的計費系統,它可以直觀地顯示出租車行駛的里程和乘客應付的費用。
1 系統功能設計
所設計的計價器的計費標準為:車在行駛3 km以內,只收起步價9.0元;車行駛超過3 km后,按每公里2元計費。行駛路程達到或超過9 km后,車費按每公里3.0元開始計費。車遇紅燈或中途暫停時,每3分鐘計0.5元。若停止(rst)則車費清零,等待下一次計費的開始。要求能夠顯示里程數和乘客應付的費用,其中里程數精確到0.01 km,乘客應付的費用精確到0.1元,顯示范圍為:里程為0~99.99公里,費用為0~999.9元。
2 系統設計方案
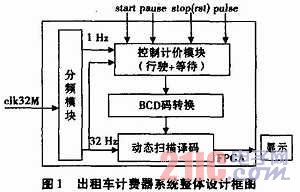
基于FPGA的出租車計費系統的組成如圖1所示。由外部輸入、FPGA控制部分以及數碼顯示三部分組成。其中FPGA部分又由分頻模塊、計價模塊、BCD轉換模塊以及動態譯碼掃描模塊組成;外部輸入包括啟動按鍵(start)、暫停按鍵(pause)、停止按鍵(stop即rst)以及兩個脈沖信號(分別是每20 m一個脈沖的路程脈沖信號pulse和32 MHz的工作脈沖信號clk32M)。顯示模塊用8個LED數碼管分別顯示行駛里程和車費,行駛里程顯示2位整數和2位小數,車費顯示3位整數和1位小數。
3 各模塊設計
設計FPGA控制部分,包括控制計價模塊,BCD轉換模塊,動態掃描譯碼模塊以及分頻模塊。采用混合設計的方法,各子部分用VHDL編程,頂層部分用原理圖進行設計。
3.1 控制計價模塊(jijia)
控制計價模塊由里程計費模塊、等待計費模塊、總價模塊組成。
里程計費模塊,主要對傳感器公里脈沖信號pulse計數(20m一個脈沖),計算出租車本次交易行駛的路程以及里程費用。每數到50個pulse為1 km,總路程由lucheng端輸出。在3 km內時,里程車費cf1為9元不變,當超過3 km時,p=1,開始里程費用計數,當計費停止,即start端口置“0”或出租車停止行駛,即rst端口置“0”時,相關數據復位,清零。
等待計費模塊,在3 km之后(p=1),每當pause=1時,則開始計時,當秒脈沖數到180個時(即3分鐘),此時等待車費cf2加5,表示車費加0.5元。
總價模塊是將里程計費和等待計費相加,計算出總費用,從chefei端輸出。
3.2 BCD轉換模塊(zhuanhuan)
該模塊將計費模塊的車費和路程轉換成4位十進制數,便于數碼管顯示。輸入口acf,bcf分別為總路程數的輸入口和總費用的輸入口,兩者都是二進制碼進行十進制編碼計數,通過該編碼器生成BCD碼,輸出口分別以BCD碼表示個,十,百,千位的數據。Aclk是工作脈沖,即32MHz。
3.3 動態掃描模塊(dtxianshi)
該模塊由動態掃描模塊以及譯碼模塊組成。動態掃描模塊,該模塊利用視覺暫留效應,采用動態掃描電路,將8進制轉換后的路程數和車費的4位十進制數顯示在數碼管上,節約了硬件資源和能源。該模塊經過8進制掃描模塊將路程和車費輪流顯示出來。端口d是選通地址碼的輸入端口,A1,A2,A3,A4,B1,B2,B3,B4分別是個,十,百,千位的數值輸入端口。根據輸入的地址碼,模塊每次只有一位數字向后傳輸到輸出口q,同時輸出小數點的顯示控制信號(dp),使路程顯示為00.00公里,費用顯示為000.0元。
譯碼模塊,該模塊把0-9的BCD碼譯成數碼管顯示碼,輸入端口q輸入掃描模塊選出要顯示的BCD碼,譯成數碼管的顯示碼由g[6..0]輸出。本設計中數碼管是共陰數碼管。
3.4 分頻模塊(fenp)
本設計中輸入的系統時鐘為32 MHz,進行分頻,再對數碼管的地址進行掃描。輸入端口rse為出租車停運信號輸入端口,當出租車停止時,該模塊停止工作,清零。當出租車行駛時對輸入的32 MHz脈沖信號進行分頻,分別從輸出端口cp1得到秒脈沖,cp32得到32 Hz工作脈沖。
3.5 整體電路
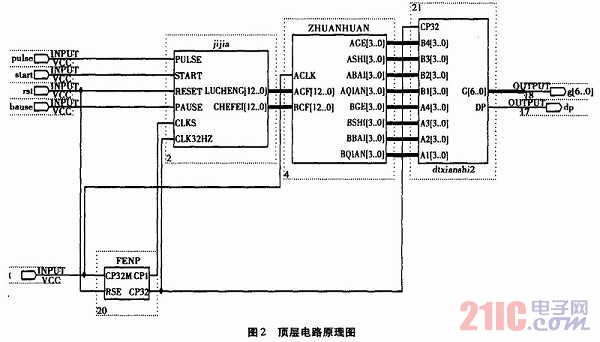
將各個模塊按照輸入輸出關系連接,頂層電路原理圖如圖2所示。g[6…0]為七段顯示碼輸出,通過動態掃描依次控制8個數碼管的顯示,dp為小數點位。
4 系統仿真驗證
用MAX+plusⅡ軟件對各個子模塊及頂層原理圖進行了時序仿真,仿真波形如圖3所示。
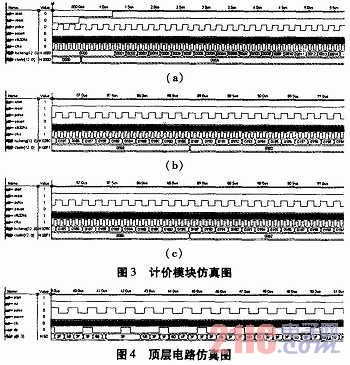
控制計價模塊仿真圖如圖3所示。由圖3(a)可得,當reset=1,start=1,且pause=0時,表示出租車處于行駛狀態,此時路程開始遞增,當不超過3 km時,車費為5A即90,起步價9.0元。由圖3(b)可得,當超過3 km后,車費每行駛1 km加20(即2元)。由圖3(c)可得,當reset= 1,start=1,且pause=1時,出租車處于等待狀態,此時路程不再遞增,而時間遞增,當時間達到3分鐘時,車費加5(即0.5元)。
頂層電路的仿真圖如圖4所示。從圖中可以看出,隨著輸入的變化,從g[6…0]輸出了共陰的數碼管顯示編碼,dp也在對應的數碼管處,輸出高電平點亮小數點。
綜上分析,本設計的軟件仿真結果正確,與設計要求相符。