
武漢中科院巖土力學所智能儀器室對基于ARM9的嵌入式系統進行二次開發,高速微處理器與現有低速設備接口及在配套的操作系統中就SY5聲波檢測儀原有功能設計相應驅動是本文研究的重點。同時提出了可行的硬件調試方法,為今后基于ARM9微處理器的硬件開發提供了思路。
1 系統構成
1.1 高性能的ARM9嵌入式微處理器
本設計選擇Cirrus Logic公司2004年7月推出的EP93XX系列中的高端產品EP9315。該微處理器是高度集成的片上系統處理器,擁有先進的200MHz ARM920T處理器并支持Linux、WindowsCE和其他許多嵌入式操作系統的存儲器管理單元(MMU)。它具有ARM920T內核所有的優異性能。與其他ARM9微處理器相比,EP9315具有以下特性:MaverickCrunchTM數學運算引擎,支持浮點、整數和信號處理指令;豐富的集成外設接口,包括PCMCIA、接口圖形加速器、可接兩組設備的EIDE、1/10/100Mbps以太網MAC、3個2.0全速HOST USB、專用SDRAM通道的LCD接口、觸摸屏接口、SPI串行外設接口、AC97接口、6通道I2S接口、8×8鍵盤掃描接口;支持4組32位SDRAM的無縫連接等。
配合Windows CE.net嵌入式操作系統,系統開發效率高、運行穩定,為工業控制提供了可靠的系統平臺。基于定制的WinCE操作系統實現工業控制中應用模塊的專用驅動,提高了嵌入式系統的通用性。
1.2 系統主體結構
EP9315嵌入式系統總體結構如圖1所示。整個系統分為嵌入式系統、應用模塊(聲波檢測儀)和轉換模塊三部分。Cirrus logic公司為用戶提供了基于該處理器的全功能開發板。該開發板擴展了EP9315的所有功能,并可根據實際需求將全功能開發板的硬件進行裁減,從而降低成本。該開發板預留了標準PC104接口,可方便用戶開發應用。應用模塊也預留標準PC104接口,其中的I/O控制信號、數據線、地址線與EP9315嵌入式系統的PC104接口一一對應。而系統中的轉換模塊可保證嵌入式系統和應用模塊連接的穩定性。
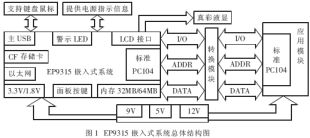
EP935嵌入式系統主要由電源、32MB/64MB內存、LCD接口、警示LED、主USB、面板按鍵、CF卡接口、以太網接口和標準PC104接口組成。其中電源提供5V、3.3V、1.8V三種電壓輸出,分別給應用模塊、外設、CPU內核供電。內存為操作系統提供運行空間。其中嵌入式系統與應用模塊的I/O控制信號、數據線和地址線都引到標準PC104插座上,經轉換模塊處理后相接。采用PC104總線標準實現了嵌入式系統的各種應用目標。液晶顯示屏用于人機交互,警示LED直觀地顯示電源狀況。主USB支持U盤和USB鼠標鍵盤,CF卡作為大容量存儲器存放應用模塊的數據,用戶通過面板按鍵實現對整個系統的控制。
1.3 嵌入式系統板與應用模塊的連接方案
系統外接的應用模塊(SY5聲波檢測儀)采用51系列單片機控制數字模擬電路實現特殊功能。整個數字電路部分均為5V供電,模擬部分由5V及正負12V供電,采樣數據通過RS232串口傳給上位機進行數據處理。而EP9315、I/O口及外圍電路均為3.3V供電,管腳承受的最大電壓不超過3.6V。
考慮到每個管腳的驅動能力有限,用電平轉換驅動芯片74LVXC4245實現電平轉換。其作用如下:
(1)改善信號的質量。某些對時延比較敏感、且在系統內又相距較遠或者較分散的信號,信號線的寄生電容會損害信號的特性。采用74LVXC4245驅動芯片進行隔離,會改善系統的性能。
(2)抗干擾。增加74LVXC4245這樣的有源緩沖器可以有效地減少干擾。
(3)電平轉換。3.3V到5V和5V到3.3V雙向電平轉換。
74LVXC4245是8通道電壓轉換器,最大可提供200mA的驅動電流。與專用模塊接口時,主要實現數據線、地址線、I/O信號、中斷信號等的單/雙向電平轉換。
地址線的電平轉換方向設置為3.3V到5V。I/O、中斷信號的電平轉換方向可設置為單向轉換,3.3V到5V或5V到3.3V片選可接地。
數據線是雙向信號,電平轉換時要特別注意其方向信號和片選信號的設計。設計不合理會造成總線沖突,系統無法啟動。數據線電平轉換電路如圖2所示。
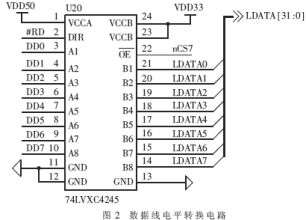
由圖2可見,方向信號使用讀信號的反向信號#RD,保證讀操作時數據線由5V到3.3V,寫操作時數據線由3.3V到5V,防止了總線沖突。使能信號OE可接地或接片選信號。
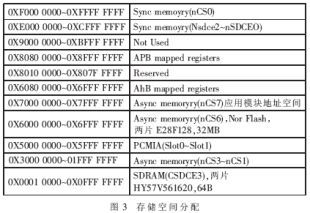
EP9315在WinCE操作系統下主頻達到200MHz,總線頻率為100MHz,外設時鐘為50MHz,硬件調試環境必須與操作系統完全吻合。而應用模塊多采用74系列芯片,工作頻率一般為幾兆赫茲。頻率不匹配造成了EP9315發出的讀寫及使能信號脈寬不足50ns,對由74系列芯片組成的專用模塊不能實現正確的讀寫操作。因此,系統的存儲空間采用了如圖3所示的分配,應用模塊地址空間為CS7:0X7000_0000-0X7FFF_FFFF。
為給低速設備提供足夠脈寬的總線信號,設置應用模塊地址空間存儲空間讀寫特性寄存器SMCBCR7中等待時間位WST1和WST2:
總線讀取等待時間=(WST+1)×總線時鐘
連續讀取等待時間=(WST+1)×總線時鐘
調試代碼如下:
//總線時鐘為200MHz
ClkSet1=0x02A4A3D7;
//設置cs7數據寬度為8,讀寫脈寬為150ns
temp=SMCBCR7;
temp=temp& 0xcfffffff;
temp=temp | 0xffef;
SMCBCR7=temp;
這種設置使得SDRAM等高速外設和低速外設擁有不同的總線頻率,具有很大的靈活性。
2 系統軟件
2.1 嵌入式操作系統下的驅動程序類型
由于Windows CE.net開發工具好學易用,沒有目標設備時可以在PC上仿真測試,因此基于Windows CE.net的嵌入式開發日益普及。但要在操作系統下控制應用模塊就要為應用模塊編寫驅動。本質上,Windows CE的設備驅動程序都是一些動態鏈接庫(.dll文件),這些dll向內核提供了入口函數,使設備管理模塊可以通過這些函數與具體的硬件設備進行通信。由于應用模塊功能的不同,微軟沒有提供相應的驅動,所以只能自行開發測試。開發過程中采用單層驅動結構。
2.2 驅動程序開發
2.2.1 應用模塊初始化
應用模塊的初始化在標準流接口函數DEV_Init( )中完成,在內核加載驅動時調用該函數,其中DEV為設備文件名的前綴,Windows CE使用其識別與特殊流接口驅動程序相對應的特殊設備。初始化的基本步驟為:
(1)檢查應用模塊硬件信息的正確性。
(2)用Windows CE中的API函數為應用模塊驅動中用到的數據結構分配緩沖區。
hDev=LocalAlloc(LPTR,sizeof(Dev_INFO));
其中:pDev為包含設備必要信息的結構體指針,Dev_INFO為該結構體類型。
(3)設置應用模塊的默認參數,如應用模塊在系統中分配的物理地址空間的基地址。
PHYSICAL_ADDRESS phyAddr;//64_bit地址
phyAddr.LowPart=hDev->dwIOBaseAddr;//32_bit物理基地址
phyAddr.HighPart=0;//高32_bit地址
(4)通過HalTranslateBusAddress( )和MmIoSpace( )映射I/O地址,提供直接訪問設備的虛擬地址。
if(!HalTranslateBusAddress(Isa,0,phyAddr,0,&phyAddr)) return FALSE;
hDev->lpMappedBaseAddr=(LPBYTE)MmMapIoSpace(phyAddr,size,FALSE);
if(!hDev->lpMappedBaseAddr) return FALSE;
如果分配內存或映射虛擬地址失敗,則返回FALSE,退出初始化程序。
(5)初始化應用模塊的讀寫屬性和共享模式。
2.2.2 應用模塊數據接收與發送
應用模塊數據的傳遞在流接口函數Dev_Write( )和Dev_Read( )中完成。
DEV_Write(<由應用程序傳入的設備句柄>,<寫入數據指針>,<寫入數據位數>)
{//每寫1字節調用一次WRITE_PORT_UCHAR( );}
DEV_Read(<由應用程序傳入的設備句柄>,<存放數據指針>,<讀入數據位數>)
{//每讀1字節調用一次READ_PORT_UCHAR( );}
其中:WRITE_PORT_UCHAR( )和READ_PORT_UCH-
AR( )中傳遞的地址為經過MmMapIoSpace( )映射過的虛擬地址。
2.2.3 建立應用程序和設備驅動的聯系
操作系統中的應用程序與驅動中的流接口函數一一對應。其關系如圖4。
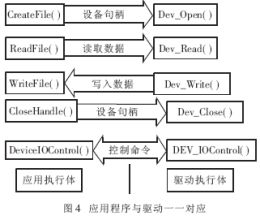
當應用程序準備對某個設備進行讀寫時,系統必須先執行CreateFile( )函數打開這個設備,得到的設備句柄即為底層設備驅動中Dev_Open( )的返回值。應用程序通過CloseHandle( )調用設備驅動中的Dev_Close( )。執行完該函數后驅動程序引用的設備將不再有效。當一個流接口驅動程序被打開后,應用程序使用ReadFile( )對這個設備進行讀操作,驅動程序中Dev_Read( )響應該操作;同樣應用程序使用WriteFile( )對該設備進行寫操作,驅動程序中Dev_Write( )響應此操作。另外,應用程序還可以使用DeviceIOControl()通知操作系統調用流接口驅動中的DEV_IOControl( )去通知驅動程序要執行的操作。這些操作用戶可用Windows CE提供的API函數CTL_CODE自定義。
結論
基于EP9315嵌入式系統對武漢中科院巖土力學所設計的SY5聲波儀的控制,設備運行穩定。與原來由51單片機搭建的SY5聲波儀相比,該系統功耗降低、體積變小、穩定性增強、成本降低,更適合工業控制中的運用。