
摘 要:提出一種主被動復合雷達導引頭數據融合" title="數據融合">數據融合器實現方案,并集中研究了主被動復合制導過程中的數據關聯、狀態濾波等若干關鍵技術,為主被動數據融合器軟件和硬件系統的設計提供技術支持。
關鍵詞:主被動復合制導? 復合導引頭? 數據融合器
?
??? 為適應復雜多變的現代戰場,雷達導引頭采用多模復合制導已經是大勢所趨。各種光電干擾的日益加劇以及各種目標特征控制技術的廣泛應用導致武器系統的命中精度和可靠性大大降低,依靠單一頻段或單一模式的制導武器難以適應現代化作戰的需要,多模復合制導技術應運而生。這種制導方式可以充分發揮多種頻段或多種制導體制的優勢,以實現對目標的準確捕獲、跟蹤制導、命中目標以及評估打擊效果的戰術目的。
??? 文中導引頭采用主被動雷達雙模復合制導體制,主要用于對地面目標和其他低空目標進行作戰攻擊制導。主動雷達具有兩種工作模式:一種是HPRF PD模式,它在下視情況下檢測強雜波中的運動目標具有優勢;另一種是步進調頻體制工作模式,它的高距離分辨力和高積累信噪比等特點是檢測靜止目標的有力手段。PD體制與步進調頻體制互相補充,揚長避短,與被動雷達相配合,可以極大地發揮系統效能。
1 數據融合器體系設計
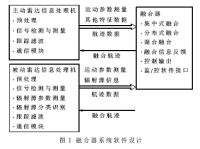
考慮到該型導引頭上主被動雷達的特點,在選擇數據融合器融合結構時,可以采用完全混合式結構[1]。系統融合結構采取混合式結構,有利于融合性能最優化,保證硬件系統魯棒性。系統的軟件結構和接口劃分如圖1所示。
?
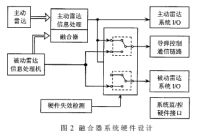
??? 圖2給出了融合器硬件系統結構和功能模塊劃分。被動雷達具有獨立的處理模塊、控制回路和通信鏈路,可以在特定條件下分別獨立控制天饋系統,輸出目標狀態數據,提高系統的健壯性。主動雷達前端預處理模塊的程式化功能在FPGA模塊中實現,主動雷達信息處理的智能化模塊和融合器模塊可以配置在一個DSP中實現,此DSP模塊具有獨立的反饋控制回路和通信鏈路。如果將預處理功能用FPGA實現,則主動雷達的信號處理和融合器處理可以在一片TI的TMS320C6701 DSP中實現。FPGA對于處理程式化的預處理功能具有天然的優勢。
2 關鍵技術研究
在設計融合器過程中,有如下幾個方面的關鍵算法:主被動雷達開機時間" title="開機時間">開機時間的確定、坐標轉換和制導信息的提取、數據相關和關聯、融合權系數選擇、濾波算法" title="濾波算法">濾波算法、角閃爍及其抑制等。
2.1 主動雷達開機時間的確定
主動雷達開機時間主要由被動雷達數據、慣導系統外推或者發射平臺數據鏈確定,本節主要考慮依據被動雷達量測數據進行距離外推確定主動雷達開機時間的問題。
單個被動雷達測量輻射源距離的方法有一點定位和動態定位。一點定位法要求已知目標位于某個平面上,測出目標與被動雷達連線到此平面的角,被動雷達到此平面的距離根據解析幾何即可以求出。該方法在衛星偵察時常被采用。動態定位的原理是被動雷達基站在運動過程中對同一輻射源進行多次測量,將這些多次測量看成是處于多個測量點的多個偵察雷達對同一輻射源的同時測量。該方法要求被動雷達能夠快速機動運動,而且對方位角度精度要求高。
對于單站無源定位,總的趨勢是引入更多的相對信息,增強系統的可觀測性,加快算法收斂速度,增強算法穩定性。在采用如上設計的融合器系統設計方案中,被動雷達截獲目標的情況下,被動定位精度完全可以滿足主被動交接班精度要求。如果結合捷聯慣導信息,則可以提供更好的定位性能和更好的抗干擾性能。
2.2 坐標變換與制導信息的提取
2.2.1坐標變換
在進行多傳感器數據融合之前,傳感器量測值或者傳感器級濾波輸出應該轉換到同一公共坐標系下。圖3給出了濾波器可能涉及到的4個坐標系,基本涵蓋所有濾波算法的需要[2]。
?

2.2.2 制導信息的提取
??? 文中導引頭應用比例導引規律。比例導引制導的優點在于它能夠有效地攻擊活動目標,在同樣的使用條件下,對導彈的過載要求比兩種追蹤導引法都小,其制導精度可以達到很高,受大氣的影響也較小,應用最為普遍。它要求彈的橫向加速度與目標視線角速度成正比。這樣比例導引制導的導引頭的首要任務是跟蹤目標并測量出目標視線在慣性系的旋轉角速度。
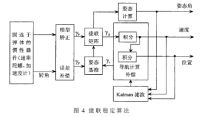
基于現代戰術導彈體積小、自主性強、能對付大機動目標的發展需要及高性能數字信號處理器的快速發展,捷聯式平臺(SINS)[3]的研究越來越成為研究熱點之一。捷聯式平臺穩定的優點是減小了導引頭體積,且降低了研制成本,尤其適用于空間上有限制的戰術導彈。捷聯穩定算法模塊實現如圖4所示。
?
2.3 濾波算法
主被動導引頭融合器實現的核心是濾波算法。集中式" title="集中式">集中式卡爾曼濾波器(CKF)采用嚴格最優估計方法對所有傳感器的信息進行集中處理。集中式卡爾曼濾波雖然在理論上可給出狀態的最優估計,但其狀態維數高,導致計算負擔重,嚴重影響了濾波器的動態性能和實時性,且其容錯性能也一般。為解決這一問題,Carlson提出了聯邦濾波器(FKF)的概念。目前,美國空軍已將聯邦濾波器列為新一代導航系統的通用濾波器。
聯邦濾波器是一種具有兩級結構的分布式濾波方法" title="濾波方法">濾波方法,它由若干個子濾波器和一個主濾波器組成,各個子濾波器獨立地進行時間更新和測量更新。主濾波器的功能有兩點:一是進行時間更新(這相當于是一個“影子”濾波器);二是將各個濾波器的結果進行融合。融合后的結果可反饋到各個濾波器,作為下一個處理周期的初值。
在將各個濾波器的估計進行融合時,聯邦濾波器是將各個濾波器的信息全部進行融合。若某個傳感器發生軟故障,而且未被檢測出來,則會對全局的結果產生不利的影響;若故障被檢測出來, 則對應的子濾波器的估計將被排除在信息融合之外,且信息要重新分配。而方差交叉濾波器是按比例地進行融合,可通過調節融合因子確定各個子系統的信息所占比例的大小。
參考文獻[4]將聯邦濾波和方差交叉濾波方法相結合,提出了一種對傳感器故障具有容錯性的分布式濾波方法。具體的做法是:采用聯邦濾波器的結構,時間更新和信息分配過程均與聯邦濾波器相同, 只是在各子濾波器進行測量更新之后, 對各個子濾波器估計值的有效性(即殘差的大小) 進行檢驗,根據檢驗結果確定融合因子,當估計值的有效性下降時融合因子也下降,然后按方差交叉濾波方法進行融合。這樣,有軟故障的子濾波器的估計在融合中比例會自動下降。
2.4 相關和關聯
多傳感器多目標數據關聯形式主要有兩種:“觀測-航跡”關聯和“航跡-航跡”關聯。前者主要應用于集中式融合結構,而后者則主要應用于分布式融合結構。由于系統采取混合式結構,對于觀測點跡與系統航跡的關聯以及局部航跡與系統航跡的關聯都提出了要求。
“觀測-航跡”關聯就是融合中心對各傳感器送來的觀測和融合中心航跡關聯,以確定用哪些觀測量更新同一航跡。 “航跡-航跡”關聯,即各傳感器向融合中心提供的是經過本地跟蹤處理得到的目標航跡,融合中心對各傳感器送來的目標航跡進行關聯,以確定哪些航跡來自同一目標。
??? 對應“觀測-航跡”和“航跡-航跡”關聯兩種情況,對關聯上的主被動雷達數據進行融合處理以形成融合航跡的方式主要有兩種:一種是集中式融合,對各主被動雷達送來的觀測量進行最佳組合(這里兩者的觀測量是不同維數的,相關時可采用兩個角度數據依據一定的準則進行),形成融合的觀測量,然后用這一融合觀測量去中央級濾波形成融合航跡;另一種是分布式融合,對各傳感器送來的目標狀態矢量估計進行最佳組合形成融合航跡,這要求在融合器上的被動信號處理中采用被動跟蹤算法。在進行相關之前,主被動傳感器的數據要進行外推同步。
2.5 融合權系數選擇
對目標觀測和目標航跡的融合一般采取基于方差的融合加權方法。設用n個傳感器對某一目標進行測量,在線自適應加權融合算法[5]的思想是在總均方誤差最小的條件下,根據各個傳感器得到的測量值以自適應的方式尋找各個傳感器所對應的最優加權因子,使融合后的目標觀測值達到最優。
??? 
最優加權因子決定于各個傳感器的方差,可根據各個傳感器所提供的測量值,依據相應的算法求出。這樣不但可以估計出相應的方差,而且可以監視傳感器性能的改變,從而實現最優加權因子的動態在線調整。
2.6 角閃爍及其抑制
角閃爍是目標固有的特征信息[6],是由于散射中心在距離單元內的橫向分布造成的,反映了散射中心的橫向分布,是雷達目標識別的重要信息。參考文獻[6]提出了分布式角閃爍的概念,研究了利用距離像和分布式角閃爍進行融合目標識別的方法。另一方面,角閃爍給目標跟蹤帶來了極大影響。參考文獻[6]總結了數據處理抑制角閃爍的各種方法,其基本思想是將角閃爍模型轉化為具有某種統計特性的噪聲,較為廣泛的數據處理方法包括:預處理法、中值濾波法、擴展卡爾曼濾波(EKF)法、非線性度函數法、交互多模型(IMM)法、粒子濾波器法等,并在此基礎之上提出了一系列角閃爍抑制方法。
文章介紹了某型導引頭上主被動雷達數據融合器的軟硬件實現方案,在此基礎上,主要研究了融合器設計中數據相關和融合關鍵算法,解決了主被動復合制導中的問題。下一步的研究工作將結合主被動復合這一背景,研制適合于該背景下不同維數觀測量的相關和狀態融合算法。
參考文獻
[1]?STALLARD D V. An angle-only tracking filter in modified spherical coordinates[A].Proc.of 1987?? AIAA?Guidance,?Navigation and Control Conf, 542-550.
[2]?FARINA A.(AMS,Italy), RISTIC B (DSTO, Australia).Tracking and data fusion tutorial. Radar 2004?Toulouse (France), October 2004:19-21.
[3]?周瑞青, 呂善偉, 劉新華. 捷聯式天線平臺的角跟蹤系統設計. 系統工程與電子技術, 2003,125(110): 1200-
?1202.
[4]?付夢印, 鄧志紅, 張繼偉. Kalman濾波理論及其在導航系統中的應用. 北京: 科學出版社, 2003,10:152-174.
[5]?胡士強, 張天橋. 多傳感器在線自適應加權融合跟蹤算法. 北京理工大學學報,2002,22(1):117-120.
[6]?李保國. 基于目標角閃爍特性的末制導雷達跟蹤與識別技術[D]. 長沙: 國防科學技術大學研究生院.2005,
?(4):65-94.?