
精密導航功能通常易與汽車、飛機、船舶聯系在一起,但事實上,在工業和醫療領域,導航功能同樣得到廣泛應用,從工廠機械和手術機器人到應急響應跟蹤。
導航問題
目前有許多方案可以取得指向、駕駛、導向設備的位置、方向和運動等信息。實際上,許多應用依賴全球衛星定位系統(GPS)的情況越來越普遍。但是,在面臨室內導航以及在處理更復雜并與環境相關的挑戰時,只靠GPS是不夠的。
對于此類應用,可以采用不同類型的傳感器來改善系統從異常動作判斷實際運動的能力。用以處理特殊導航問題的特定傳感器,其能力不僅取決于傳感器的性能,同時也要依據應用的獨特動態特性而定。
大多數應用包含不同的檢測技術,其中沒有任何一項技術能夠獨立地滿足應用要求。對于GPS,障礙物會阻斷衛星接收,因而容易發生錯誤。另一種常見的導航輔助設備是地磁儀,此裝置需要清晰地接觸地球的磁場,然而在工業環境中會有許多磁場干擾,造成地磁儀的可靠性無法始終處于最佳狀態。光學傳感器會受到視線阻礙的影響,慣性傳感器一般來說不會受到這些干擾,但其自身也存在一些限制,例如缺乏絕對參考點(哪里是北方?)。
傳感器選擇
汽車行業20年的應用歷史證明,MEMS慣性傳感器具有高可靠性,同時具有低功耗、小尺寸和低成本的優勢,在手機和視頻游戲中的成功應用說明它在商業上也極具吸引力。然而,現有的性能水平卻存在著很大的差異,適合游戲的器件并不能處理高性能導航問題。舉例來說,精密工業和醫療導航所需的性能水平通常比消費電子設備所用MEMS傳感器的性能水平高出一個數量級。
大多數情況下,設備的運動相對復雜(多軸運動),因此需要完整的慣性測量單元(IMU),可整合多達六個自由度的慣性移動(三組線性與三組旋轉)。
舉例來說,ADI公司的ADIS16334 iSensor IMU能夠適應許多工業儀器和汽車應用。許多情況下,可以整合四個或更多的額外自由度,包括三軸磁力檢測和單軸壓力(海拔高度)檢測。
慣性測量單元可以輸出高度穩定的線性與旋轉傳感器值,這些值必須針對下列影響因素進行補償:
溫度和電壓漂移
偏置、靈敏度和非線性度
振動
X、Y、Z軸對準誤差
慣性傳感器會因為其品質而具有不同的漂移度,設計人員可以利用GPS或是地磁儀來校正此漂移。
除了良好的傳感器設計以外,導航應用最主要的挑戰則是決定不同時候以哪些傳感器為準。慣性MEMS加速度計和陀螺儀已經證明,它對于設計人員完成一套完整功能的檢測系統設計,具有良好的輔助作用。
在GPS信號會中斷以及機械和電子設備產生磁力干擾的室內工業或醫療環境中,設計人員必須通過非傳統方案實現機械導引。許多新興應用,例如手術工具導航等,所需要的精度顯著高于汽車導航。在所有這些情況中,慣性傳感器都是一個選項,能夠在視線受阻或是其他干擾來源會對非慣性傳感器造成不利影響時,提供維持精確度所需的航位推算指引。
圖1顯示的是一個通用慣性導航系統(INS),可以用來導引從手術工具到汽車、飛機等的任何東西。該INS模型包括一個卡爾曼濾波器,這種濾波器首先用于阿波羅登月任務,目前則已普遍應用于移動通信的鎖相環中,以提供多個良好但不完美的傳感器相結合的機制,從而獲得關于位置、方向和總體動態特性的最佳估計結果。
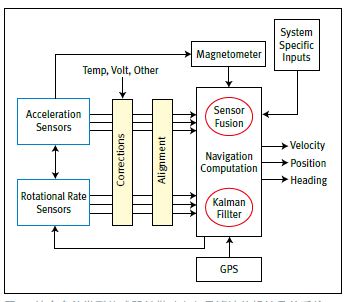
圖1,結合多種類型傳感器并借助卡爾曼濾波的慣性導航系統 。
在手術應用領域,INS可以起到輔助導航的作用,依據病患的個體特點,幫助對準人工關節,例如膝蓋或髖關節等。除了能夠實現更好的對準(以提高舒適度)以及更快速、侵入較少的手術之外,采用正確的傳感器也有助于消除手部顫動和疲勞的問題。
近年來,純粹的機械式對準通過光學對準來輔助補充,但正如阻礙汽車導航的GPS信號阻斷問題一樣,手術室中潛在的視線阻礙會限制光學傳感器的精度。以慣性導引的手術對準工具則能夠輔助補充(甚至取代)光學導引,不會有視線方面的問題,同時能夠提供尺寸、成本和自動化方面的潛在優勢。
在消費應用極力追求小尺寸、低功耗、多軸慣性傳感器的同時,某些傳感器開發人員同樣重視開發緊湊、高精度、低功耗、高性能的傳感器。這些具有良好環境適應性的傳感器,正在工業、儀器儀表及醫療市場掀起一波采用MEMS慣性傳感器的浪潮。