
引言
隨著現代科技不斷發展,人們對于各種基座平臺水平精度的要求也越來越高,而現有的一些光學儀器已不能滿足對一些工程、建筑、實驗室和軍艦基座平臺進行水平度檢測,針對這一現實問題,采用新華龍公司的C8051F040作為主控制器,設計出一個具有承重、傾角調節及液晶顯示、語音播報等功能的高精度電子承載平臺平衡調整系統。電子承載平臺是一種承重、測量的設備,其工作原理是通過傾角傳感器將作用在承載平臺上的傾角大小轉換為相應的電信號,以數字量的形式在液晶顯示屏上顯示出來,并且系統能實現自動調平。
系統采用C8051F040作為控制核心,利用高精密傾角傳感器將傾角大小經液晶屏顯示、語音播報輸出,并能通過外部設定自動調整平臺的水平和傾斜。如何選擇承載平臺的支撐腿,穩定速度和提高精度是系統設計的關鍵。系統選用直流電機驅動升降桿控制平臺傾角,速度調整靈活,承載力大,精度高。系統具有的功能包括:可承載1000克重的物品,平臺可沿任意方向在30°內傾斜,能在8秒內調平,調平精度<2°,且具有人機交互顯示、語音播報等功能,是一個多功能的高精度平衡調整系統。
方案設計
根據設計要求,承載平臺平衡調整系統可以劃分為穩壓電源,單片機(MPU),升降推桿,LCD顯示模塊,鍵盤控制模塊和語音播報模塊。系統模塊基本框圖如圖1所示。
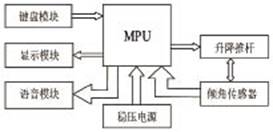
圖1 承載平臺平衡調整系統模塊基本框圖
升降推桿驅動方式的選擇
升降推桿是一個重要的單元模塊。系統是通過調整位于矩形平臺三個邊角升降推桿的位置,來實現平臺平面傾角的變化,升降推桿驅動方式的好壞直接影響最終的結果,有如下兩種可選驅動方案。
方案一:步進電機驅動螺旋推桿
用步進電機實現物體的精確定位和方向控制。步進電機是一種脈沖控制電機,它是一種能將脈沖信號轉換為角位移的數模轉換器,可廣泛用于無需反饋控制但要求有精確位置的場合。該驅動方式是以步進電機旋轉螺桿的方式來實現推桿的伸縮,達到改變平臺各點位置的目的。步進電機可以實現準確步長,但輸出力矩低,速度慢,體積大,較笨重。
在實際操作中,螺桿標準件的螺紋間距小,要達到8秒內迅速升降定位,需要電機轉速達到10轉/s,在實際測試中,步進電機的最大轉速是3轉/s,無法達到系統設計8秒內調整傾角的要求。
方案二:直流電機驅動升降推桿(見圖2)

圖2 直流電機驅動升降推桿結構簡圖
采用帶旋轉編碼器控制直流電機,電機運轉平穩,精度可以得到保證。但其驅動電路復雜,在短時間內難以實現。而直流減速電機具有轉速快,體積較小,重量輕,可直接使用單片機輸出PWM控制轉速和可控性好的特點,經計算,選擇減速電機以求較大力矩,即可滿足系統在時間指標上的要求。
方案一可以達到高精度控制,但轉速無法達到系統設計要求,方案二可達到系統速度和精度設計要求,且結構設計更為合理,故采用方案二。
電機驅動模塊的選擇
方案一:采用電機細分驅動。電機細分驅動芯片TA8435可以用兩路PWM信號控制兩個步進電機,能夠較多地節省單片機資源,但致命的缺點是當單片機速度變化較大時,電機很容易失控。
方案二:采用專用芯片L298N。響應頻率高,一片可控制兩個直流電機,操作方便,穩定性好,外圍電路簡單,焊接容易。
因此,電機驅動模塊采用方案二。
電源模塊的選擇
方案一:采用干電池作為系統的電源,由于系統耗電量較大,使用干電池需經常換電池,不符合節約型設計要求。系統所需采用機械部件多,系統平臺傾斜角大,電池總量大,使用干電池存有較大安全隱患。
方案二:采用24V可充電蓄電池電源,不僅功率可以滿足系統需求,不需要更換電池,而且比較輕便,使用更加安全可靠。
基于以上分析,電源模塊采用方案二。
顯示模塊和鍵盤模塊的選擇
本設計顯示模塊使用液晶顯示屏顯示時間和路程。12864M漢字LCD液晶顯示器的優點:微功耗、尺寸小、超薄輕巧、顯示信息量大、字跡清晰、美觀、視覺舒適;可以用中文LCD液晶進行菜單顯示,使整個控制系統更加人性化。而鍵盤模塊則選用4×4矩陣鍵盤。
傾角傳感器的選擇
本設計傾角傳感器采用SFT245AL雙軸傾角傳感器。該傳感器將物理信號轉換為電信號,經放大電路放大并濾波后,通過A/D轉換將模擬電壓信號轉換成數字量傳送給MPU,校準處理后轉化為傾角測試結果,測量范圍±45°,它具有零點設定,輸出頻率可調和波特率可選等功能。
語音芯片的選擇
該系統在語音播報上不需要長時間的語音播放,為了減小成本,本設計語音芯片選用ISD1420,其錄音時間為20秒,價錢便宜,技術成熟。
最終方案
經過上述的分析和論證,本設計決定系統各模塊采用的最終方案如下:
(1)主控單元:C8051F040單片機;
(2)穩壓電源:24V蓄電池;
(3)傳感器單元:SFT245AL雙軸傾角傳感器;
(4)顯示模塊:LCD12864M;
(5)鍵盤模塊:4×4矩陣鍵盤;
(6)語音模塊:ISD1420芯片。
系統詳細結構圖如圖3所示。
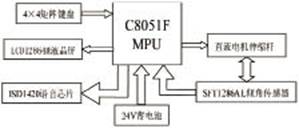
圖3 承載平臺平衡調整系統詳細結構圖
系統主要單元電路設計
電源模塊和繼電器電路的設計
電源模塊使用L2576HV穩壓電路,具體電路圖如圖4。

圖4 穩壓電源電路圖
繼電器控制直流電機的正反接,實現滑輪的上下滑動。每個繼電器都有一個工作指示燈。當繼電器通電時燈亮,斷電時燈滅。燈亮時電機接口接電源正極,燈滅時接地。每次轉換時都要先接地。繼電器電路設計如圖5所示。
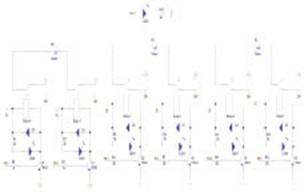
圖5 繼電器電路圖
電機驅動電路的設計
電機驅動模塊采用L298N電路,具體電路如圖6所示。

圖6 電機驅動電路圖
液晶顯示電路的設計
由于C8051F單片機不帶LCD驅動,所以需要設計液晶顯示驅動,12864M的CS,WR,DT,液晶顯示驅動電路如圖7所示。

圖7 液晶顯示驅動電路圖
矩陣按鍵的設計
本系統總共需要16個按鍵,按鍵掃描電路如圖8所示。
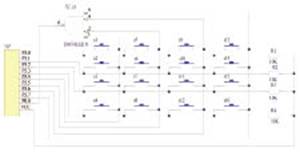
圖8 按鍵掃描電路圖
語音模塊電路的設計
語音模塊采用ISD1420芯片,語音電路實現錄音和放音的功能,具體電路設計如圖9所示。

圖9 語音電路圖
系統程序設計
系統軟件所實現的功能
該系統要完成對傾角傳感器所傳來的信號進行處理來控制運動物體的運行方向、計算運行物體的坐標位置、LCD數據顯示和鍵盤控制等功能。歸納為以下兩大功能:(1)對傾角傳感器所采集的數據進行處理和運算,并輸出到LCD顯示。(2)對按鍵輸入信號采集和判斷,控制直流電機升降桿的位置。
系統軟件流程設計
該系統軟件設計由液晶顯示子程序,語音播報子程序,按鍵掃描子程序和傾角調整子程序組成。系統主程序流程圖如圖10所示。

圖10 系統主程序流程圖
設計實現和功能調試
直流電機推桿速度測試
測試儀器:直尺(精度0.01m),量角器(精度0.1°),鉛垂,秒表(精度10ms)。
測試方法:首先測試推桿的最大升降速度,用直尺測量出推桿開始的距離值A點,電機兩端加上24V電壓,開始計時,記錄下結束距離值B點和結束時間,計算出升降速度。表1的數據是多次測試取得的推桿平均速度,測試結果見表1。
表1 直流電機推桿速度測試結果記錄表

角度調節精度測試
測試儀器:秒表(精度10ms),量角器(精度0.1°)。
測試方法:通過按鍵輸入角度值,記錄下時間后,通過液晶顯示傾角傳感器的傾角數值,與量角器測試的數值比較之后,記錄下實際傾角數值后,比較得出該系統精度。測試結果見表2,經過測試得出該系統調角時間在5秒之內,精度控制在2°的誤差。
表2 角度調節精度測試結果記錄表

結束語
C8051F040是高度集成的混合信號SoC級微控制器芯片。承載平臺平衡調整系統集成了C8051F040處理器、傾角傳感器、ISD1420語音播報模塊、人機交互界面等硬件電路。整個系統結構清晰,速度穩定,操作簡單,成本低,經測試,該系統運行可靠,具有較好的應用前景。