道路運輸車輛衛星定位系統車栽終端,是實現全國重點營運車輛聯網聯控系統統一的重要組成部分。車載終端的設計充分利用JT/T794-2011交通運輸行業標準進行設計,采用內置的GPS衛星定位模塊獲得定位信息,以及利用車輛狀態信息采集模塊獲得車輛運行情況信息,通過GPRS傳輸模塊傳輸數據,同時具有對車輛監聽、通話的功能。實驗結果表明,道路運輸車輛衛星定位系統車載終端功能良好,具有很好的實用性。
為了加強道路運輸安全管理和運輸車輛動態監管工作,預防和減少道路交通運輸事故的發生,確保所有旅游包車、三類以上班線客車和運輸危險化學品、煙花爆竹、民用爆炸物品的道路專用車輛(即“兩客一危”車輛)能被企業、政府平臺實時監控,包括監控運輸車輛駕駛入超速行駛、疲勞駕駛等違法行為,實現道路運輸科學發展、安全發展的有效手段,道路運輸車輛監控系統已經逐步受到人們的重視,我國交通管理部門對這種車載終端的技術要求制定了嚴格的標準,這些標準將為車載終端的設計與實現提供了重要的技術依據。
道路運輸車輛監控系統包括車載終端、企業平臺、各級政府平臺和部級平臺構成,這些構成部分通過通信網絡進行連接。其中的每個部分都需要車載終端的參與,車載終端是安裝在道路運輸車輛上滿足工作環境要求,具有衛星定位系統、移動網絡接入、道路運輸車輛行駛記錄、道路運輸車輛相關信號采集和控制,與其他車載電子設備進行通信,提供政府平臺或企業平臺所需的信息,完成衛星定位系統對車輛功能的裝置。因此,車載終端是道路運輸車輛監控系統中非常重要的組成部分。本文所介紹的“道路運輸車輛衛星定位系統車載終端”就是系統中車載終端的一個具體實現。下面詳細介紹車載終端系統的功能與設計實現方法。
1 道路運輸車輛衛星定位系統車載終端的功能
根據道路運輸車輛衛星定位系統車載終端技術要求,車載終端應具有如下要求:1)車輛衛星定位;2)無線通信;3)車輛信息采集;4)報警,包括主動報警和自動報警;5)在必要時進行車內監聽,及與上級平臺進行通話。另外,車載終端還根據駕駛員需要實現了其他功能:1)電招服務;2)多中心接入;3)限制車輛行駛范圍和行駛時間,監控車輛的行駛軌跡等。車載終端的這些功能使其特點適用于企業、政府的管理、調度等領域。
2 基于GPS-GPRS的系統設計
GPS車載移動終端采用在世界上領先的GPS全球衛星定位技術、無線通信技術以及計算機數據數據處理技術,可為用戶提供多方位的、全時域空間定位信息,目前廣泛應用于車輛防盜防偷、車載電話、車輛保險跟蹤,遠程遙控遙測、危險品車輛以及運營車輛監控監管、車輛故障管理等。
如何把定位數據信息發送給企業平臺、政府平臺一直是比較難解決的問題之一。以往的交通監控系統多采用集群通信系統實現車載終端與各級平臺的通訊,但是這種系統具有覆蓋局域小、安裝維護費用高、技術復雜等缺點。近兩年隨著GPRS網絡在中國的普及,車載終端通過GPRS網絡與企業平臺、政府平臺通訊的方式已經成為最受歡迎的方式。GPRS通用分組數據業務,是一種基于GSM的移動分組數據業務,它的意義就是在GSM網絡中引入分組交換能力,同時將速率提高到100kbps以上。使用GPRS模塊可以方便地利用GPRS網絡進行通訊,主要有以下原因:1)GPRS利用分組技術,傳輸高速數據、低速數據和信令,使網絡資源和無線頻譜資源得到更好的利用;2)定義了新的GPRS無線信道,并更加靈活地分配這些信道;3)支持基于標準數據通信協議的應用,可以和IP網、X.25網互連互通;4)網絡接入速度快,提供了與現有數據網的無縫連接;5)既能支持間歇的爆發式數據傳輸,又能支持偶爾的大量數據傳輸。其具體系統結構如圖1所示。
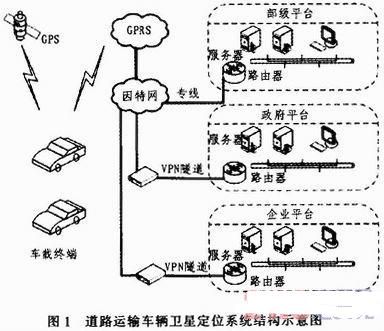
首先車載終端通過北斗衛星定位獲得自己在全國的坐標信息;然后以GPRS數據通訊方式把定位數據信息按指定的時間間隔發送到各級平臺,同時車輛運載的狀態信息、行駛記錄信息、以及報警信息也通過GPRS網絡傳送給各級平臺;各級平臺的控制、監控、實時導航等也是通過GPRS網絡發送到車載終端中,車載終端與各級平臺的通訊符合專用的命令協議和數據交換協議,本命令協議采用TCP協議,數據交換協議采用JT/T 809-2011標準;最后,省部級平臺還可以通過VPN專用網技術或其他安全聯網技術連接到下級平臺,以控制、查看車載終端的狀態信息。
3 車載終端硬件系統的設計
硬件基本設計思想是,整個硬件系統按照實現功能和硬件結構可以劃分成2個硬件模塊:主控板模塊和存儲模塊。主控板模塊主要有微處理器、GPRS模塊、GPS模塊、電源模塊等部分組成,完成系統的主控功能,如視音頻采集、處理和顯示、網絡控制、報警控制、衛星定位、行駛記錄以及USB控制等功能;存儲板模塊主要實存儲模塊構成,實現存儲介質安裝和存儲介質的替換。其硬件系統結構如圖2所示。

3.1 微處理器
主控微處理器采用的華邦公司的W78E516單片機;利用16C554AIPN芯片,將單片機的低8位數據總線擴展為4個串口;其中GPRS模塊與A口相連,B口和C口分別通過RS-232電平轉化芯片后,再通過5566插座控制外部的其他設備,如車載LED顯示屏、攝像頭等;而GPS模塊直接與單
片機的一個串口相連,而單片機的另一個串口則通過RS-232電平轉換芯片后,與存儲模塊相連。在硬件系統中,主控微處理器負責接收用戶的按鈕輸入信號和衛星定位輸入信號;對衛星定位信號進行計算,以獲得當前的經、緯度坐標;接收并解析各級平臺發送的短消息命令,按命令進行上傳定位坐標、報警等操作;另外還負責把車輛的運行狀態及平臺發布的命令信息通過液晶屏顯示出來。
3.2 GPRS模塊
本車載終端選用的GPRS模塊是SIM300,SIM300是SIMCOM推出的GSM/GPRS三頻模塊,主要為語音傳輸、短信息和數據業務提供無線接口。集成了完整的射頻電路和GSM的基帶處理器,適合于開發一些GSM/GPRS的無線應用產品。外部系統連接器主要提供外部電源、RS-232串口、SIM接口和音頻接口。支持GSM07.07和GSM07.05增強型AT命令集。它內嵌了TCP/IP協議棧,并簡化了接口設計。屏蔽了GSM模塊的復雜接口方式和接口協議棧,取而代之的是通用的232接口和簡單的AT命令交互界面。它同主控制器以RS-232串行口的方式連接,并采用一定的波特率進行通信。主控制器可以通過AT命令控制GPRS模塊使其發送短消息,使用GPRS傳送數據或進行語音通話。
3.3 GINS模塊
GPS模塊用于接收GPS衛星信號,并計算出車載終端所在的位置。它由變頻器、信號通道、微處理器和存儲單元等組成。GPS模塊通過串行口向主控制器發送定位坐標;主控制器也可以向GPS模塊發送設置命令,以控制GPS模塊的狀態和工作方式。GPS模塊需要專門的GPS天線接受GPS衛星信號才能進行準確定位。在車載GPS智能系統中把天線放置在車頂可以有比較好的定位效果。現選擇REB3310。該模塊具有低功耗、抗干擾能力強、扛遮擋能力強等特點,適用范圍包括汽車定位導航、地圖制作等。
3. 4 電源模塊
電源模塊用于給系統中的其他模塊供電。終端系統需要電源模塊提供3路電壓,分別為:3.6 V、5 V、3.3 V。其中,GPRS模塊在發送和接收數據時需要的電流比較大(約為2 A),選用了NationM公司的LM2576電源芯片。它是一種PWM方式調制的高功率穩壓芯片,可以提供高達3.5 A的尖鋒電流。
電源模塊中還設計了后備電池系統,在車載電源不工作或被破壞時給車載GPS終端供電。在車載電源工作正常的情況下,后備電池會自動被充電。
4 車載終端軟件系統的設計
基本設計思想是,采用面向對象語言C++開發,基于模塊化模型,主要功能有系統初始化、建立GPRS連接、定位數據接收、車輛采集信息處理、接收各級平臺下發的信息和向各級平臺匯報信息等。車載終端軟件系統的主要功能是由主程序完成的。主程序采用狀態機的系統結構,其總體結構圖如圖3所示。其中,(a)為總體流程框圖,(b)為GPRS報文處理部分流程圖,(c)為位置報文處理部分流程圖。終端可以處于8種狀態:空閑、上傳定位信息、定時上傳定位信息、撥號、通話中、網絡無法連通、衛星無法定位、報警。狀態間的切換主要由各級平臺通過發送消息的命令報文控制。

首先介紹程序響應的中斷系統,由于微處理器與各個模塊之間的通訊是不定期、不定長的通訊,為了保證不出現阻塞情況,系統采用中斷接收方式:把接收到的所有數據在中斷過程中放入對應的循環緩沖區之中,然后由主程序解析接收到的串口數據;同時微處理器還要響應另外兩個中斷:一個是報警按鈕被按下時觸發的中斷;另一個是定時中斷,它每20ms觸發一次,用于檢測GPRS模塊的超時應答。程序工作時先進行初始化工作,然后進入主控制循環。在主控制循環中首先檢查GPRS數據緩沖區中是否有完整的GPRS數據包,如果有則進行解析,并根據協議中的控制命令改變終端所處的狀態。接著判斷位置信息數據緩沖區中是否有完整的位置數據包,如果有則取出并解析出當前的全球定位坐標,以供上傳坐標時使用。最后根據終端所處的狀態對終端進行操作,例如:終端處于上傳定位消息的狀態,則控制GPRS模塊上傳定位的消息;終端處于自動報警的狀態,則控制GPRS模塊上傳報警的消息。
5 結束語
實驗證明,“兩客一危”GPS衛星定位系統車載終端可以較好地完成終端定位、與各級平臺的通訊、車輛狀態信息上傳、報警等功能,并且具有成本較低、系統覆蓋面廣、使用維護費用低、通訊可靠、永遠在線等特點。而且是設計成一個可以提供實時,準確,交互的信息系統,基本上實現了無盲區的定位,保障性的定位的效果。
