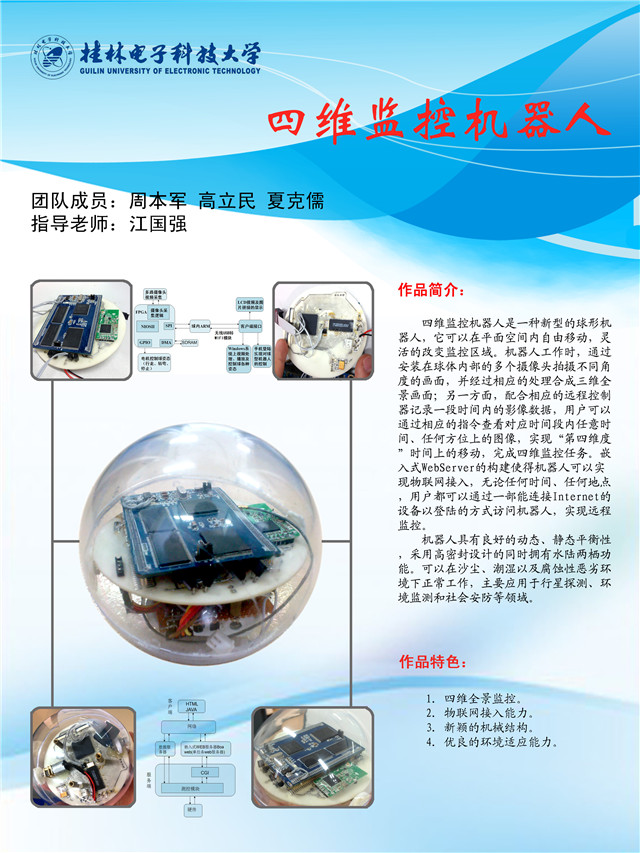
桂林電子科技大學-四維監控機器人 第八屆全國研究生電子設計競賽 摘要: 四維監控機器人是一種新型的球行機器人,它可以在平面空間內自由移動,靈活的改變監控區域,機器人工作時,通過安裝在球體內部的多個攝像頭拍攝不同角度的畫面,并經過相應的處理合成三維全景畫面。 關鍵詞: 思維全景 自由移動 遠程控制 Abstract: Key words : 原創聲明:此內容為AET網站原創,未經授權禁止轉載。