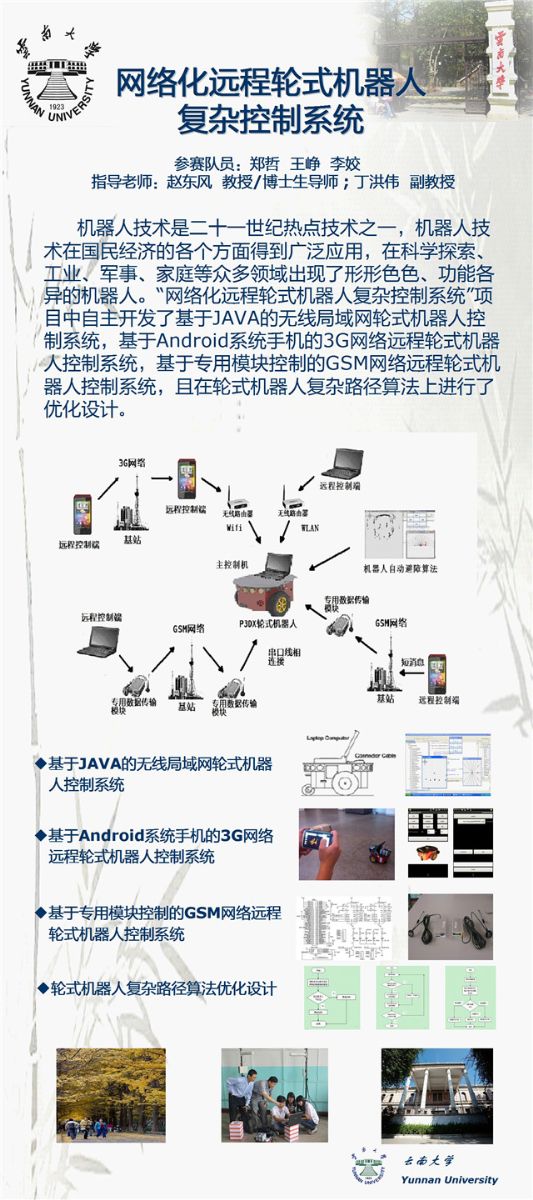
網絡化遠程輪式機器人復雜控制系統 第八屆全國研究生電子設計競賽 摘要: 該項目自主開發了基于Java的無線局域網輪式機器人控制系統,基于Android系統手機的3G網絡遠程輪式機器人控制系統,基于專用模塊控制的GSN網絡遠程輪式機器人控制系統,且在輪式機器人復雜路徑算法上進行了優化設計。 關鍵詞: 嵌入式操作系統 遠程輪式 控制系統 網絡化 Abstract: Key words : 原創聲明:此內容為AET網站原創,未經授權禁止轉載。