
文獻標識碼: A
文章編號: 0258-7998(2014)08-0027-04
隨著氣象、民航及新能源領域等發展的需要,傳統機械式風速儀正逐漸被新型超聲波式風速儀所取代。目前,超聲波式風速儀多被用于固定點測量[1],體積大,不便于移動,需通過有線方式將數據傳輸至上位機進行后期處理,不能實時顯示風測量信息,其布線復雜且維護困難,不利于移動式多點測量。同時,現有的超聲波風速儀電路結構較復雜,功耗較大且成本高。在分析了現有超聲波風速儀缺點的基礎上,本文提出并設計了一種基于ARM-Linux和CPLD的高精度、低成本的可視化移動式風速儀。
1 超聲波風速儀測量原理
超聲波信號在流體中傳播時會承載流體流動的信息,利用時差法、多普勒法、頻差法[2-3]等可以獲得流體的流速和流向等信息。由于時差法原理簡單,電路易實現,且受外界環境因素影響小,目前大部分超聲波風速儀都采用時差法對風速風向進行測量。本設計中將兩對收發一體的超聲波換能器正交放置,實現對水平方向上二維風的測量。超聲波時差法測量結構示意圖如圖1所示。每對超聲波換能器之間的距離固定,當超聲波在流體中傳播時,受流體影響超聲波存在順向和逆向,其具有一定的時間差,通過獲得該順向和逆向的時間差就可以確定所測流體的速度和流向。
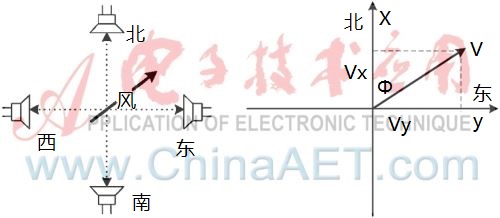
圖1 超聲波時差法測量結構示意圖
如圖1所示,設置兩換能器之間的距離為L,可得超聲波在南北和東西方向上順向和逆向的傳播時間分別為t南北、t北南、t東西和t西東,依據時差法測量原理[4],可得到風速在直角坐標系上的風速分量如式(1)和式(2):
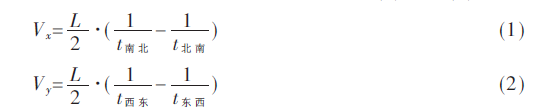
依據矢量計算定理,由式(1)和式(2)可得到風速值。本設計中選擇正北方向為0°方向,按順時針方向進行轉動,根據式(3)可獲得當前風的風向值:
根據超聲波時差法測風原理,只需獲得超聲波在固定距離上順向和逆向所傳播的時間,就可以測定流體的流速和流向。同時時差法測風可以消除溫度等環境因素引起的聲速變化而導致的測量錯誤。
2 系統總體結構設計
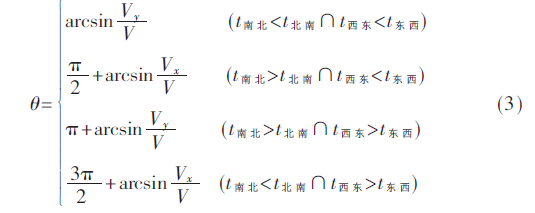
基于ARM-Linux和CPLD的移動式風速儀的硬件結構框圖如圖2所示。系統主要包括ARM主控制器單元、CPLD協處理器單元、超聲波驅動電路模塊、信號接收調理模塊、LCD顯示模塊、存儲模塊以及超聲波換能器陣列單元。
系統采用CPLD芯片EPM-570T100C5作為協處理器,通過接收ARM處理器發出的控制命令來執行超聲波信號的發送、接收及渡越時間的測量。超聲波渡越時間的測量直接影響到風速儀測量結果的精確性,本設計中CPLD外接100 MHz的晶振,使其內部計時單元的分辨率可達到10 ns,完全滿足該系統的設計精度要求。同時CPLD具有可并發執行的特性[5],可使CPLD在驅動超聲波傳感器的同時啟動內部計數,與順序執行流程相比,其消除了代碼運行所帶來的計時誤差。此外,并發執行方式可提高信號處理的速度,使其滿足實時性要求。主控制器選用ARM11芯片S3C6410來作為系統的顯示、控制及運算核心,系統通過ARM處理器發送控制命令給CPLD,計算和存儲由CPLD送入的數據,并以可視化界面形式將風速和風向值進行顯示。
圖2 風速儀硬件結構框圖
超聲波換能器收/發陣列將4個收發一體的超聲波換能器正交放置[6]實現對二維平面上風速/風向的測量。根據換能器陣列結構的設計,選用的超聲波換能器應具有高的靈敏度和分辨率,本設計中采用型號為FUS-200A的高頻壓電式超聲波傳感器,其工作中心頻率為200 kHz,對于同頻率的超聲波換能器的驅動電壓一般為200~400 V,而該換能器所需驅動電壓為60 V,并且其具有較低驅動功率。陣列中各超聲波換能器之間保持25 cm距離。超聲波換能器按次序發射一定頻率的超聲波信號并測量其順向和逆向傳播的時間,通過計算可以得到所測風的風速和風向值。
2.1 系統硬件設計
2.1.1 超聲波驅動電路設計
為了獲得超聲波換能器工作時所需的電壓,驅動電路設計中采用原/副邊匝數比為42:420、型號為750 A的超聲波專用升壓中周變壓器P2構成升壓電路,使由QU1端輸入的方波控制脈沖信號能將變壓器原邊的低壓方波脈沖升至60 V左右,從而驅動超聲波換能器發出超聲波信號。圖3為超聲波驅動單元電路原理圖。
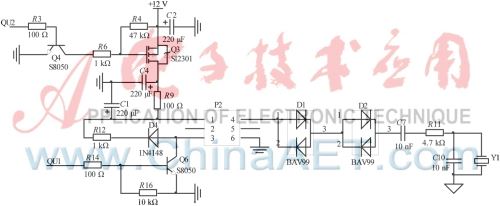
圖3 超聲波驅動單元電路原理圖
為了保證變壓器P2在處于原邊的由8050三極管構成的開關電路導通時,其副邊能同時驅動超聲波換能器,同時為了使開關電路斷開后能快速釋放變壓器中多余磁能,防止處于“空載”狀態的變壓器P2存儲的磁能使電感飽和而燒毀開關器件,采用電阻和高速開關二極管1N4148構成磁通復位電路來釋放磁能。在實際調試中,QU1端至少要產生16個頻率為200 kHz的脈沖方波信號才能使升壓中周變壓器驅動后續的超聲波換能器。圖4為QU1端輸入16個方波脈沖信號時,變壓器副邊輸出的波形圖像,該信號可穩定驅動超聲波換能器發出超聲波信號。
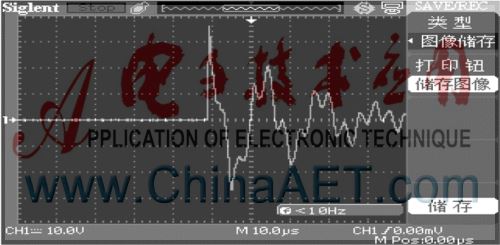
圖4 變壓器副邊輸出波形圖
2.1.2 超聲波信號調理電路設計
本設計中采用包絡檢波法來實現對超聲波回波渡越時間的測量。由超聲波換能器發出的信號在傳播中因環境等影響,其信號幅值會發生變化,但對于接收端,其首波點與回波包絡峰值之間的周期數是確定的,通過檢測回波信號包絡峰值點到達的時間,就可以確定超聲波傳播的渡越時間。超聲波信號調理電路如圖5所示。
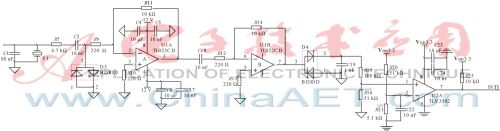
圖5 超聲波信號調理電路
在氣體流速測量中,當兩換能器之間的距離在10 cm~50 cm時,變壓器副邊的60 V脈沖信號驅動換能器發射超聲波信號,其相應接收端接收到的回波信號電壓等級一般在毫伏級,為了滿足后續調理電路的輸入要求,需要在提高接收端信號的信噪比的同時對回波信號進行放大。本系統設計中選用TI公司低噪聲高速運放TLE2072構成兩級放大電路,該前置放大電路將接收到的回波信號放大2 000倍左右,放大后由運放輸出的電壓在± 10V以內,滿足后續電路的要求。放大輸出的信號經由雙二極管和電容構成的包絡檢波電路進行處理,獲得平滑的包絡信號,使環境因素對接收回波信號的影響降到最低,提高渡越時間測量的精度。經包絡檢波電路輸出的信號送入由軌到軌高速比較器TLV3502構成的電壓型比較電路中,其基準電壓設置為2.2 V,可有效防止電路中噪聲影響而引起的誤中斷觸發,包絡信號經TLV3502獲得數字中斷觸發信號,使CPLD暫停計數,獲得超聲波渡越時間。圖6為實際調試過程中觸發捕獲到的中斷信號波形圖像。

圖6 TLV3502輸出中斷觸發信號
2.1.3 Linux移植與界面顯示
本系統設計目標板中采用Linux-2.6.38內核進行底層數據端口驅動程序和電阻觸摸式LCD顯示屏界面的開發,宿主機中選擇Ubuntu-9.10運行環境,并采用ARM-Linux-gcc-4.5.1交叉編譯器進行目標板代碼編譯[7]。由于S3C6410的BSP支持多種不同類型和不同顯示分辨率的顯示屏,LCD顯示屏無需編寫驅動模塊即可顯示。而對于底層數據端口驅動程序的操作則采用動態添加的方式,無需多次編譯內核。
2.2 系統軟件設計
基于ARM-Linux和CPLD的移動式風速儀系統軟件設計主要包括S3C6410、EPM570T100C5以及LCD液晶界面部分設計。S3C6410的軟件設計主要包括端口初始化程序、LCD數據讀取及顯示程序、風測量控制程序、ARM與CPLD數據傳輸程序、SD存儲程序、RS485通信程序六部分。EPM570T100C5的軟件設計主要包括:端口初始化程序、計時程序、超聲波發送和接收程序、CPLD與ARM數據傳輸程序。S3C6410采用RVDS集成開發環境進行C語言編程,EPM570T100C5在Quartus II 8.1環境下采用Verilog語言進行開發。圖7為進行一次測量時的程序流程圖。
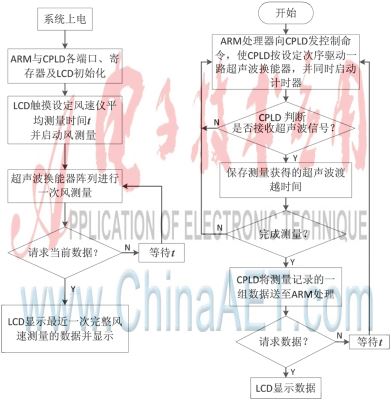
圖7 風測量程序流程圖
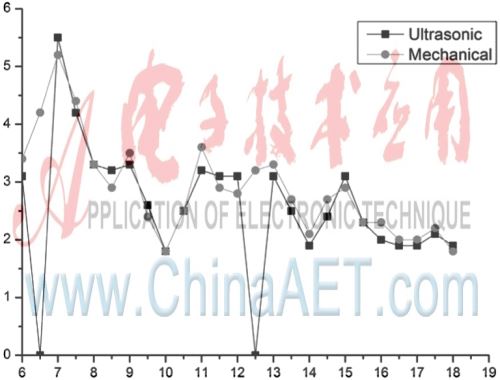
圖8 風杯式與超聲波式風速儀測量數據對比圖
3 實驗結果及分析
測試采用將傳統機械風杯式風速儀與本設計超聲波式風速儀放置在同一風洞中進行驗證測試對比,超聲波式風速儀通過LCD界面設置其平均采樣間隔為20 min,連續對其測試12 h,來驗證所設計系統的測量準確性和工作穩定性。風杯式風速儀與超聲波式風速儀測量數據統計結果及對比如圖8所示,由于對于風向的準確測量要求所測風速足夠大,本設計中系統預先設置風向移動閾值,當風向高于該閾值時才輸出相應風向值,若未超過該閾值,則系統輸出預先設置的數值。為了便于對風速儀進行分析,這里僅統計固定時間點的風速值來進行系統穩定性及準確性分析。
由于對風速的測量屬于一種不確定性測量,可利用統計學中標準差方法對測量數值集合進行測量精確性分析,分析測量數值是否符合預測值或對比值以及判斷所設計的風速儀是否符合設計要求。利用標準差及標量平均值原理[8-9],得到超聲波式風速儀的平均值為2.56,標準差為1.132 11;風杯式風速儀的平均值為2.896,標準差為0.844 83。通過分析知,超聲波式風速儀測量結果接近風杯式風速儀測量數據,其標準差數據與預測值相差較小,可以判斷本系統設計合理。
同時從圖8中風杯式與超聲波式風速儀測量數據直觀對比結果來看,本系統所測得的數據比較準確,系統基本能夠滿足設計要求實現對風的測量,且在長時間工作狀態下,性能穩定可靠,在可靠性和測量精度上均能達到較高的水平。
本文基于超聲波時差法設計了一種基于ARM-Linux和CPLD的移動式風速儀。重點闡述了系統工作的基本原理,并詳細介紹了系統主要部分硬件電路的設計及系統軟件設計流程和方法。系統設計中充分考慮了成本、低功耗及便攜式問題。實驗測量結果表明,整個系統軟硬件設計合理,測量精度可以滿足實際工程需求,解決了現有風速儀不便移動及數據顯示不直觀的問題,且實現成本較低,具有一定的實際工程應用價值。
參考文獻
[1] 李勇峰,楊錄,張艷花.基于AN7218的超聲波接收電路 設計[J].電子技術應用,2013(8):91-94.
[2] 杜偉略,談向萍.低功耗超聲波風向風速傳感器設計[J].測控技術,2013(9):12-15.
[3] 康基偉,楚亞博,馮海波.基于ARM的超聲波法風速風 向測量系統[J].儀表技術與傳感器,2012(12):67-69.
[4] 丁向輝,李平.基于FPGA和DSP的超聲波風向風速測量 系統[J].應用聲學,2011(1):46-52.
[5] 徐勤衛,周秦,劉瑛.高頻超聲波信號處理電路[J].電子技術應用,1994,20(7):45.
[6] 金晶,唐慧強.基于ARM的超聲波風速測量系統[J].儀表技術與傳感器,2009(6):101-102.
[7] 王民意,鐘新躍.時差法在超聲波氣體流量計中的應用研究[J].儀表技術與傳感器,2013(7):26-28.
[8] 葛俊杰,劉景景,王英民.計算機控制的時差式超聲波流量計系統[J].電子技術應用,1999,25(6):11-12.
[9] 陳上挺,謝文彬,游穎敏.基于STM8的紅外與超聲波測 距儀設計[J].電子技術應用,2011,37(9):32-34.
(收稿日期:2014-05-05)
作者簡介:
毛曉輝,女,1989年生,碩士,主要研究方向:圖像檢索、模式識別等。
汪慧蘭,女,1978年生,碩士,副教授,主要研究方向:圖像檢索、模式識別等。
陸健,男,1989年生,碩士,主要研究方向:超聲波檢測、自動控制技術、嵌入式儀器儀表等。