
基于TinyOS的嵌入式無線傳感器網絡設計
雷遠 熊建設 趙曉慧 賈吉慶
來源:現代電子技術
摘要: 無線傳感器網絡是集信息采集、信息傳輸、信息處理于一體的綜合智能信息系統。由于它由大量體積小,成本低,具有無線通信、傳感、數據處理能力的傳感器網絡節點組成。所以功耗、成本、體積、處理能力等受到嚴格的限制。以此超低功耗單片機MSP430為核心,結合無線收發模塊nRF24E1,對無線傳感器網絡的普通節點和網關節點進行了設計。
Abstract:
Key words :
0 引 言
無線傳感器網絡是集信息采集、信息傳輸、信息處理于一體的綜合智能信息系統。由于它由大量體積小,成本低,具有無線通信、傳感、數據處理能力的傳感器網絡節點組成。所以功耗、成本、體積、處理能力等受到嚴格的限制。以此超低功耗單片機MSP430為核心,結合無線收發模塊nRF24E1,對無線傳感器網絡的普通節點和網關節點進行了設計。
1 無線傳感器網絡
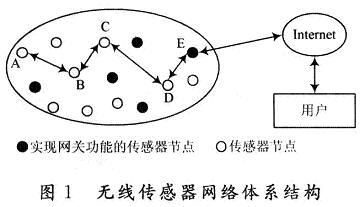
由于傳感器節點功率的限制,傳遞的距離非常有限,網絡節點除了從外界環境采集數據外,還要接收鄰近節點的數據,對數據進行處理、融合、轉發。圖1中節點A通過節點B,C,D將數據傳送至網關節點E。再由網關節點與外部網絡相聯,將數據發送給用戶。
2 硬件設計
無線傳感器網絡節點主要由傳感器模塊、處理器模塊、無線收發模塊、電源模塊構成,如圖2所示。

2.1 數據采集模塊
數據采集模塊直接與外界接觸進行信息感知和采集。它將采集的物理量通過積分、放大電路的整形處理后經過A/D轉化為數字信號送給處理器。
2.2 數據處理和控制模塊
數據處理和控制模塊是傳感器節點的核心,它主要實現設備控制、任務調度、資源管理等功能。作為硬件平臺的中心模塊,應該具有集成度高,功耗低,運行速度快,I/O和擴展接口多等特點,并應適應整個網絡的需要。基于以上原因,可以采用TI公司的 MSP430系列超低功耗處理器、高效的16位.RISC CPU確保任務的快速執行,以縮短工作時間;可以從睡眠模式到活動模式的6μs轉換時間延長待機時間,降低電池的功耗;集成12位A/D轉換器、溫度傳感器、FLASH程序存儲器和2 KB RAM,具有豐富的端口資源,可以與各種傳感器連接。
2.3 通信模塊
無線收發模塊主要完成傳感器節點之間、節點與無線傳感器網絡網關之間的數據交換功能,這里采用Nordic公司的nRF24E1芯片。nRF24E1內部集成了2.4 GHz的nRF2401無線收發器,其增強型8051內核和9輸入的10位A/D轉換器無線收發模塊能夠實現點對點、點對多點的無線通信,具有體積小,功耗低和外圍電路簡單等特點。對于無線傳感器網絡中的一些只實現數據采集和傳送功能的節點可以由nRF24E1內嵌的8051單片機進行控制處理,所以可直接采用nRF24E1和傳感器模塊構成傳感器節點。然而,對于數據處理要求高,功能復雜,計算量大,要為通信協議、功能協調、應用處理等提供硬件支持的節點(如網關節點),則采用MSP430作為處理器,nRF24E1作為無線通信模塊,其連接圖如圖3所示。

通過配置特殊寄存器,可使nRF24E1工作在ShockBurst無線方式。數據低速輸入高速發送,功耗極低,并可通過軟件控制開關進一步降低能耗。用MSP430的P1口控制nRF24E1,通過配置CE,PWR,CS三個控制管腳,使芯片工作在不同的模式。當nRF24E1工作在發送方式時,接口引腳為CE,CLK1和DATA;當CPU請求發送數據時,置CE為高電平。此時,將接收機地址和有效載荷數據送入nRF24E1,置CE為低電平,激活ShockBurst發射;當nRF24E1工作在接收方式時,接口引腳為CE,DR1,CLK1和DATA。在正確設置射頻包輸入載荷的地址和大小后,置CE為高電平。此后,nRF24E1監測信息輸入,若收到有效數據包,則給處理器一個中斷,并置DR1為高電平,使處理器將有效載荷數據取走,待系統收到全部數據后再置DR1為低。此時,如果CE保持高電平,則等待新的數據包;若CE置低電平,則開始其他工作流程。
2.4 電源模塊
傳感器網絡能量有限,目前主要解決節約電能的方法是采用休眠機制,即節點在沒有事件發生時盡快進入休眠狀態;而在有事件發生時及時自動醒來,并喚醒鄰居節點,形成數據轉發的拓撲結構。在光線充足的地方采用太陽能電池代替化學電池,使節點有更長的工作時間。
3 嵌入式操作系統的設計與實現
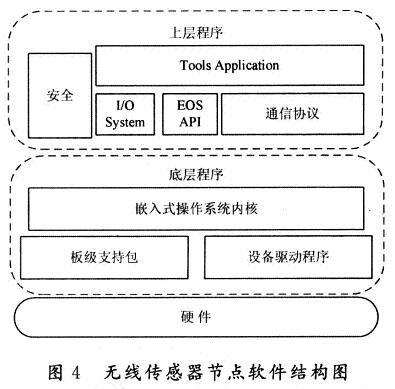
無線傳感器網絡是由大量節點組成的網絡系統,每個節點可看作一個微型的嵌入式平臺。現有的嵌入式操作系統大多是實時操作系統,很少考慮能源供應,而且占用空間很大。由于無線傳感器網絡節點處理能力、電源及存儲能力有限,采用TinyOS嵌入式系統,并引入輕線程、主動消息、事件驅動和組件化編程。TinyOS是一種專門為嵌入式操作系統設計的基于組件的操作系統,由nesC 語言實現,主要應用于無線傳感器網絡。TinyOS根據嵌入應用可以輕易增減控制執行的功能,而且編譯器可避免數據競爭的現象,可節省硬件資源,并能執行多個快速響應的控制操作。
3.1 組件
TinyOS操作系統一般由Main組件(初始化硬件并執行調度程序)、應用組件(實現具體應用功能)、系統組件(為應用層組件提供服務)、HPL(硬件描述層)構成。這種體系結構使得TinyOS非常方便用戶使用,增加了操作系統的移植性和軟件的復用性。
無線傳感器網絡是由大量節點組成的網絡系統,每個節點可看作一個微型的嵌入式平臺。現有的嵌入式操作系統大多是實時操作系統,很少考慮能源供應,而且占用空間很大。由于無線傳感器網絡節點處理能力、電源及存儲能力有限,采用TinyOS嵌入式系統,并引入輕線程、主動消息、事件驅動和組件化編程。TinyOS是一種專門為嵌入式操作系統設計的基于組件的操作系統,由nesC 語言實現,主要應用于無線傳感器網絡。TinyOS根據嵌入應用可以輕易增減控制執行的功能,而且編譯器可避免數據競爭的現象,可節省硬件資源,并能執行多個快速響應的控制操作。
3.1 組件
TinyOS操作系統一般由Main組件(初始化硬件并執行調度程序)、應用組件(實現具體應用功能)、系統組件(為應用層組件提供服務)、HPL(硬件描述層)構成。這種體系結構使得TinyOS非常方便用戶使用,增加了操作系統的移植性和軟件的復用性。
3.2 接口
這里的接口是一個雙向通道,它具有的功能和事件通知能力是雙向的,向調用者提供命令和實現命令者進行事件通告。代碼如下:
這里的接口是一個雙向通道,它具有的功能和事件通知能力是雙向的,向調用者提供命令和實現命令者進行事件通告。代碼如下:

TinyOS應用程序還要使用testSM,GenericComm等組件實現無線傳感器網絡的邏輯功能。test5M提供接口的命令,并實現對調用接口事件的響應;GenericComm通過調用其他組件實現從消息包到主動消息、位級數據傳送到無線電收發模塊的功能。為了能將TinyOS移植到節點平臺上,需要根據節點平臺設計修改TinyOS中的初始化代碼,編寫自己的BSP程序,達到移植操作系統的目的。
GenericComm提供了256個消息收發接口,采用CSMA/AD的MAC協議,消息到達組件test5M中,receive事件就會立刻調用。因此在這個事件中實現不同消息的轉換,從而實現通信雙方的握手:
4 結 語
在分析無線傳感器網絡體系結構的基礎上,設計以超低功耗單片機MSP430為核心,并結合了無線收發模塊nRF24E1的無線傳感器網絡節點。軟件開發平臺采用TinyOS操作系統,從硬件、軟件等方面對無線傳感器網絡的節點進行了設計。
此內容為AET網站原創,未經授權禁止轉載。