
引 言
CAN(Controller Area Network)為控制器局域網絡,CAN總線規范已經被國際標準化組織制訂為國際標準ISO11898,并得到眾多半導體器件廠商的支持,推出各種集成有CAN協議的產品。CAN屬于總線式串行通信網絡,由于其采用了許多新技術和獨特的設計,低成本、高可靠性、實時性、靈活性、抗干擾能力強等特點,已被廣泛應用于各個自動化控制系統中。在汽車電子、自動控制、電力系統等領域,CAN總線具有無可比擬的優越性。
以太網以其通信數據量大、傳輸速度快、開放性好、成本低等優點,彌補了現場總線通信速率低的缺陷,成為現階段信息網絡應用最廣的局域網技術。用以太網直接進入工業控制領域,目前還存在一些問題,以太網的媒體訪問方式CSDA/CD不能保證網絡傳輸的確定性和實時性,不能滿足工業現場惡劣環境的要求。將以太網引入工業測控領域,通過與現場總線(CAN BUS)分工合作,構成兩種異構網絡結構,將高效的以太網和低速的現場總線相結合,解決大規模測控系統實時性和可靠性矛盾,提高整個系統的工作效率。兩種異構網絡的互連,需要用嵌入式網關實現。
CAN/Ethernet網關設計的主要任務是協議轉換,要求數據解析正確完整,同時響應迅速、耗時低、實時性和安全性好。基于RISC架構的ARM微處理器指令執行效率高,軟件操作平臺易于建設,同時具備豐富的外圍擴展電路,能滿足實時多任務要求。使用ARM技術構造以太網與CAN現場總線協議轉換網關是一種高效可行的方案。
1 網關硬件系統組成
網關的主要功能是進行以太網數據報文與CAN數據幀之間的協議轉換,實現以太網與CAN總線的互聯。系統的硬件組成包括CAN總線接口設計和以太網接口設計,如圖1所示。
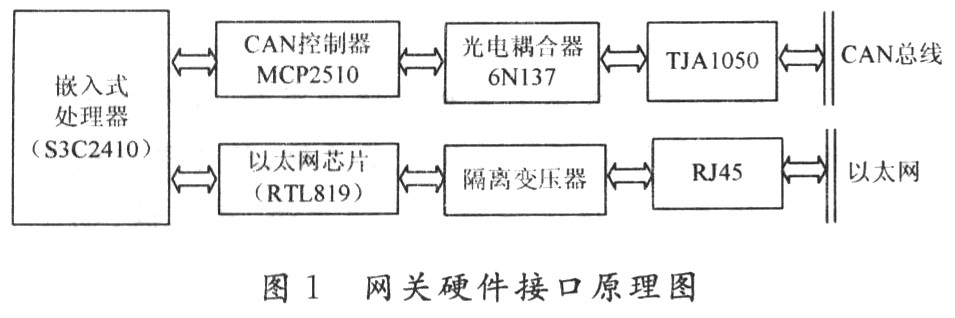
S3C2410是Samsung公司推出的一款低價位、低功耗、高性能的32位RISC嵌入式處理器。該芯片采用ARM920T內核,5級流水線和哈佛結構,工作頻率高達266 MHz,運行速度可達1.1 MIPS。S3C2410提供了豐富的內部資源,如:SDRAM控制器、LCD控制器、3通道的UART、4通道的DMA、2個SPI模塊,支持輪詢、中斷與DMA三種數據發送模式。雖然內部沒有CAN控制器,但可以通過SPI接口進行擴展,接口電路簡單,易于實現。
CAN總線接口電路主要采用帶SPI接口的獨立CAN控制器MCP2510、CAN總線收發器TJA1050、高速光隔6N137和DC/DC電源隔離模塊DCR010505等設備組成。獨立CAN控制器MCP2510完全支持CAN總線的V 2.0A和V 2.0B的技術規范。系統設計時,將MCP2510作為從設備連接到S3C2410的SPI0口。TJA1050總線收發器是CAN控制器和物理總線之間的接口芯片,增強了總線的驅動能力。為增強CAN總線節點的抗干擾能力,MCP2510的TXCAN和RXCON并不直接與TJA1050的TXD和RXD相連,而是通過兩片光電耦合器6N137與TJA1050相連,同時光隔芯片的兩端電源采用DC/DC模塊進行隔離。這樣就實現了系統外總線CAN節點間的完全電氣隔離,增強了節點的穩定性和安全性。總線兩端都接有1個終端電阻(120 Ω)和1個TVS管,以消除反射信號,有效提高系統的抗干擾能力。
以太網接口電路是在S3C2410片上擴展網絡接口芯片RTL8019AS,RTL8019AS是臺灣REALTEK公司生產的一種基于ISA總線的高度集成的以太網控制器。它實現了以太網媒介訪問層(MAC)和物理層(PHY)的全部功能,包括MAC數據幀的收發、地址識別、循環冗余檢驗(Cyclic Redundancy Check,CRC)編碼/校驗、曼徹斯特編解碼、超時重傳、鏈路完整性測試、信號極性檢測與糾正等。RTL8019AS與主處理器有3種接口模式,跳線模式(Jumper),即插即用模式(PnP)和免跳線模式(Jumperless)。系統采用常見的跳線模式來選擇I/O端口和中斷。
2 協議轉換流程
當CAN總線上的設備向Ethernet網發送數據時,嵌入式網關將接收到的CAN數據包解析,提取數據域中的內容;然后按照TCP/IP協議進行封裝,嵌入式網關將經過封裝的數據發送給以太網控制芯片RTL8019AS。由RTL8019AS自動給這些數據添加以太網物理層和邏輯鏈路層所需的相關信息,通過物理接口傳送到以太網。反之,當以太網向CAN總線上設備發送TCP/IP數據包時,它首先將數據發送到RTL8019AS,嵌入式網關從RTL8019AS中接收到數據后,提取實際要傳送的數據,然后封裝成CAN總線數據格式,通過CAN總線將數據發送到網絡中的現場設備。
嵌入式網關硬件必須具有以太網接口和CAN總線接口,而軟件要有TCP/1P協議棧和CAN總線驅動程序;通常嵌入式Linux內核中有完整的TCP/IP協議棧。由于REALTEK公司支持Linux的開發,Linux系統中已含有RTL8019AS芯片的通用驅動程序,CAN總線協議驅動并不是標準配置。因此,設計CAN總線接口及其編制驅動程序是實現嵌入式網關最主要的工作。
3 CAN驅動程序設計
Linux驅動程序屬于Linux內核的一部分,是嵌入式系統控制硬件的接口,它為用戶屏蔽設備的工作細節,并向用戶提供透明訪問硬件設備的機制。驅動程序的開發在嵌入式系統開發中具有舉足輕重的地位。開發出穩定、完備的驅動程序可提高整個系統的性能。
3.1 CAN驅動程序流程
MCP2510的內部結構框圖如圖2所示。

MCP2510內含3個發送緩沖器和2個接收緩沖器,同時還具有靈活的中斷管理能力。CAN協議機負責與CAN總線的接口,SPI接口邏輯用于實現同MCU的通信,而寄存、緩沖器組與控制邏輯則用來完成各種方式的設定和操作控制。
在Linux多任務操作系統中,CAN總線通信程序的設計可分為發送數據模塊、接收等待模塊和中斷處理模塊實現。系統中CAN總線的數據發送和接收是兩個不同的線程。在驅動程序中建立數據發送和接收緩沖區。中斷處理程序只負責填充(或讀取)緩沖區中的數據,然后喚醒等待接收(或發送)數據的任務。數據的發送與接收都通過獨立的緩沖區,并由中斷來實現。操作系統的中斷響應時間在軟件上決定了CAN總線數據的最快收發速度。
3.2 CAN設備驅動程序的實現要點
3.2.1 CAN設備驅動操作函數
CAN設備驅動程序最終提供給應用程序的是一個流控制接口,主要包括:open,realse,read,write,ioctl等操作。添加設備驅動程序,實際上就是給上述操作編寫相應的程序代碼。驅動程序加載到內核時,會首先運行驅動程序的初始化函數,然后等待系統調用在file_operations數據結構中定義的相關函數,實現對設備的操作。系統使用Linux 2.4.18版本,其文件系統接口被寫義為:

s3c2410_mcp2510_open負責對將要進行的I/O操作做好必要的準備工作,主要包括限制CAN打開次數、清空3個發送緩沖區和2個接收緩沖區等。
s3c2410_mcp2510_write將要發送的數據通過SPI總線將數據傳送MCP2510的發送緩沖器,再通過MCP2510將數據發送到CAN總線。
s3c2410_mcp2510_read用于將MCP2510從CAN總線上接收到接收緩沖器的數據,通過SPI總線讀到用戶區,并返回所讀出的字節數。
s3c2410_mcp2510_ioctl用于控制CAN總線通信的波特率、設置幀ID、設置工作模式、設置設備濾波器等工作。
s3c2410_mcp2510_release用于釋放所占用的內存、中斷等資源。
3.2.2 CAN設備的初始化函數
CAN設備的初始化函數主要負責創建CAN設備的節點設備文件、注冊CAN設備的中斷處理函數、初始化MCP2510等工作。
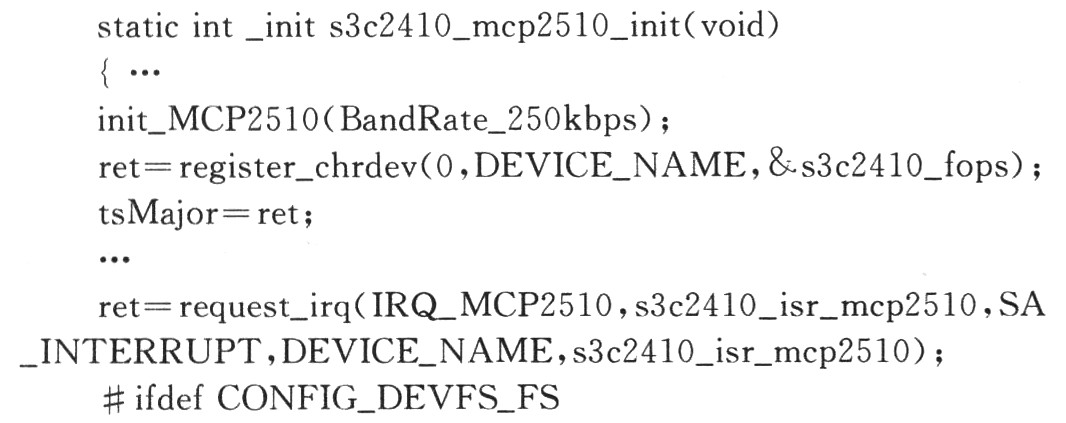
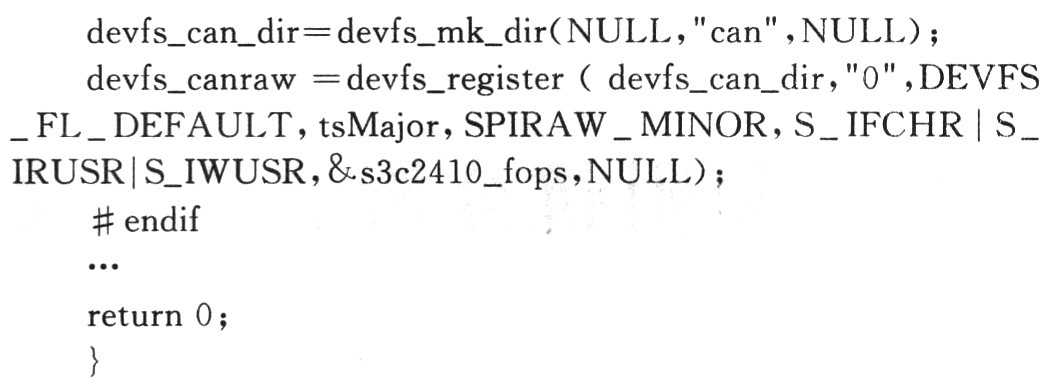
在Linux系統中,初始化函數從s3c2410_mcp2510_init()開始。通過調用register_chrdev向系統注冊字符型設備驅動程序;通過devfs_register()函數創建設備文件系統的CAN設備節點。同時,CAN設備驅動程序通過調用request_irq函數來申請中斷,向系統注冊CAN設備的CAN中斷處理函數s3c2410_isr_mcp2510()。在實現了MCP2510的各個接口函數后,還需要編寫MCP2510的模塊加載函數module_init()和模塊卸載函數module_exit(),用于向內核注冊設備及注銷設備。
3.2.3 驅動程序的加載與使用
Linux設備驅動會以內核模塊的形式出現。Eth-ernet/CAN網關設備驅動程序作為內核的一部分,應在編譯時把設備驅動程序編譯成可加載的模塊。當使用insmod命令加載內核模塊時,模塊的加載函數mod-ule_init(初始化函數名)會自動被內核執行,將初始化函數加入內核全局初始化函數列表中,在內核初始化時執行驅動的初始化函數,從而完成驅動的初始化和注冊,之后驅動便停止等待,被應用程序調用。當用rm-mod命令卸載某內核模塊時,模塊的卸載函數module_exit(退出處理函數名)也會自動被內核執行,完成與模塊加載函數相反的功能。當驅動程序加載到內核中后,就可將CAN設備文件進行open,read,write,release等操作。
4 結語
隨著工業控制系統性能的提高,以太網在工業上的應用也會越來越廣泛。在此詳細介紹了一種嵌入式網關的設計與實現。作為連接以太網和現場總線的紐帶,實現以太網與CAN現場總線之間的協議轉換,為CAN/Ethernet的互聯提供了一種傳輸速度快、成本低,穩定性和安全性高的解決方案。同時,利用嵌入式ARM處理器,接口資源豐富,設計通用性強,便于擴展其他現場總線與以太網的互聯,具有較好的應用推廣價值。