
1 引 言
Simulink是一個(gè)用來(lái)對(duì)動(dòng)態(tài)系統(tǒng)進(jìn)行建模、仿真和分析的軟件包。它支持連續(xù)、離散或兩者混合的線(xiàn)性和非線(xiàn)性系統(tǒng),也支持具有多種采樣速率的多速率系統(tǒng)。另外,Simulink還提供一套圖形動(dòng)畫(huà)的處理法,使用戶(hù)可以方便地觀(guān)察到仿真的整個(gè)過(guò)程。這些功能正是進(jìn)行雷達(dá)干擾技術(shù)研究分析中亟待解決的問(wèn)題,本文以雷達(dá)干擾技術(shù)中的噪聲調(diào)幅干擾為例,說(shuō)明Simulink技術(shù)在雷達(dá)干擾技術(shù)中的應(yīng)用。
2 噪聲調(diào)幅干擾原理
噪聲調(diào)幅干擾是噪聲干擾的一種,其干擾信號(hào)的載波幅度是受噪聲調(diào)制的。

可以看出,噪聲調(diào)幅信號(hào)的頻譜由載頻頻譜和兩個(gè)對(duì)稱(chēng)的旁頻帶組成,其帶寬等于調(diào)制噪聲頻譜寬度的兩倍。
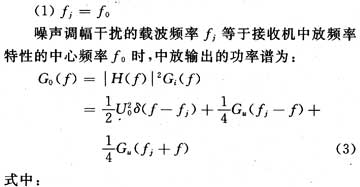
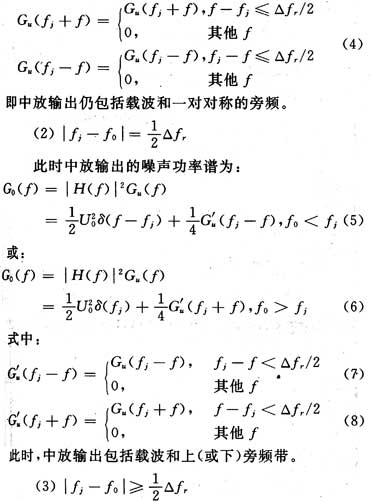
當(dāng)干擾信號(hào)被雷達(dá)接收機(jī)截獲后,根據(jù)干擾信號(hào)頻率與雷達(dá)接收機(jī)中放的中心頻率之間的關(guān)系,可以得到不同的干擾結(jié)果。
假設(shè):干擾頻率譜寬度大于中放帶寬,且中放的頻率特性為矩形。
這時(shí)中放輸出中只包含上(或下)邊帶的部分頻率分量,其實(shí)這就是窄帶噪聲。中放輸出的噪聲包絡(luò)的概率分布為瑞利分布。
3 Simulink動(dòng)態(tài)仿真
3.1 噪聲調(diào)幅干擾仿真
根據(jù)噪聲調(diào)幅干擾的原理,Simulink模型如圖1所示。

帶限白噪聲發(fā)生器經(jīng)過(guò)調(diào)幅調(diào)制器得到噪聲調(diào)幅信號(hào),再經(jīng)過(guò)傅里葉變換可以近似求得噪聲頻譜圖,如圖2所示。
通過(guò)示波器,可以對(duì)雷達(dá)回波調(diào)幅信號(hào)、噪聲調(diào)幅信號(hào)和回波與噪聲疊加后的信號(hào)進(jìn)行對(duì)比,如圖3所示(第一欄為模擬雷達(dá)回波調(diào)幅信號(hào),第二欄為噪聲調(diào)幅信號(hào),第三欄為回波與噪聲疊加后的信號(hào))。

通過(guò)Scope2可以清楚地看到解調(diào)出載波后,雷達(dá)回波完全淹沒(méi)在了干擾信號(hào)中,如圖4所示。

3.2 噪聲調(diào)幅干擾效果對(duì)比仿真
在噪聲調(diào)幅干擾的基礎(chǔ)上,根據(jù)干擾機(jī)瞄頻誤差的不同,針對(duì)三種情況,通過(guò)仿真對(duì)其干擾效果進(jìn)行對(duì)比。建立Simulink模型如圖5所示。

圖6為仿真試驗(yàn)所選取的載波、噪聲以及二者調(diào)制后的噪聲調(diào)幅信號(hào)的時(shí)域波形圖。
圖7為仿真試驗(yàn)所選取的載波、噪聲以及二者調(diào)制后的噪聲調(diào)幅信號(hào)的頻譜圖。

4 仿真結(jié)果分析
圖8為頻率對(duì)準(zhǔn)(即fj=f0)情況下中放輸出信號(hào)的頻譜圖,比較圖7中的調(diào)幅信號(hào)頻譜可以看出此時(shí)的輸出為載波和一對(duì)對(duì)稱(chēng)的旁頻。


圖12給出了不同條件下信號(hào)通過(guò)檢波后的波形圖,由圖中可以看出:當(dāng)干擾頻率對(duì)準(zhǔn)雷達(dá)頻率時(shí),干擾效果最好,當(dāng)干擾頻率與雷達(dá)頻率相差半個(gè)中放帶寬以上時(shí),起不到應(yīng)有的干擾效果。
由以上分析過(guò)程可見(jiàn),利用Simulink使得對(duì)噪聲調(diào)幅信號(hào)的計(jì)算與分析變得十分方便和直觀(guān)。

5 結(jié)語(yǔ)
在雷達(dá)干擾信號(hào)的設(shè)計(jì)過(guò)程中,如果能合理使用Simulink技術(shù),可以達(dá)到事半功倍的效果。當(dāng)然,本文對(duì)Simulink技術(shù)在雷達(dá)干擾信號(hào)中的運(yùn)用,還只是一種初步的嘗試,只有不斷的探索,Simulink技術(shù)在雷達(dá)干擾信號(hào)中的運(yùn)用才可以達(dá)到更深入廣泛的應(yīng)用。