
摘 要: 介紹了一種由氣動人工肌肉" title="人工肌肉">人工肌肉構建的雙足" title="雙足">雙足機器人關節,該關節利用氣動人工肌肉的柔性特性,可以有效控制雙足機器人快速行走或跑步時的落地腳沖擊問題。詳細給出了氣動人工肌肉的工作原理以及由其構成的關節系統的硬件架構。同時介紹了基于此硬件關節搭建的控制軟件系統" title="軟件系統">軟件系統。
關鍵詞: 氣動人工肌肉 頡頏關節 軌跡跟蹤控制" title="跟蹤控制">跟蹤控制 雙足機器人
雙足機器人相比于一般的移動機器人在非結構化環境中具有更好的移動能力,因而受到研究者的廣泛關注[1]。控制機器人獲得快速的行走速度以及實現跑動步態仍然是雙足機器人領域中具有挑戰性的問題之一。機器人快速行走或跑動時,擺動腳在落地的瞬間會產生一個較大的沖擊力,此力使落地腳反彈或使零力矩點(zero moment point)產生較大跳變,從而造成機器人穩定裕度降低和跌倒。這種現象被稱為沖擊效應,它是制約雙足機器人提高步行速度和跑步的因素。
氣動人工肌肉是近年來發展起來的一種新型的驅動器,McKibben型氣動肌肉是其中應用最為廣泛的一種。它具有柔順、功率/質量比大、在力/長度特性上與人類肌肉類似等優點。由于其具有柔順性可控的優點,應用氣動人工肌肉作為驅動器可以有效地解決雙足機器人的落地腳沖擊問題。因此,將氣動人工肌肉作為雙足機器人的驅動器具有良好的前景。但是,人工肌肉具有高度非線性的特點,并伴隨有遲滯現象,使得對其建模和控制困難。目前,基于氣動人工肌肉的雙足機器人的研究剛剛起步,只有少數幾個雙足機器人項目對此進行了研究。本文利用McKibben氣動人工肌肉搭建了類似生物頡頏關節的單自由度人工關節。此系統的硬件部分包括氣壓驅動子系統、傳感器子系統和控制子系統。在此硬件系統上構建了軟件系統,實現了對此人工關節軌跡的跟蹤控制。基于本文的工作可以進一步研究和解決氣動人工肌肉及關節的建模和控制問題,為設計和搭建基于氣動人工肌肉驅動器的雙足機器人打下基礎。
1 氣動人工肌肉關節系統軟硬件設計
1.1 氣動人工肌肉
McKibben氣動人工肌肉是由美國醫生Joseph. L. McKibben發明并以其名字命名的一種柔性氣動驅動器。McKibben氣動人工肌肉的主體主要由外層編織網和內層彈性橡膠管組成,其結構如圖1所示。
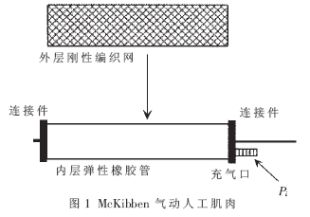
圖1為肌肉結構圖,其中,Pi為輸入氣壓,其大小由控制器根據實際工作情況進行控制。當輸入端氣壓Pi增大時, 內層橡膠管膨脹,由于外層編織網剛度很大,幾乎不能伸長, 限制肌肉只能徑向變形(直徑變大,長度縮短),產生軸向收縮力;而當輸入端氣壓Pi降低時,導致人工肌肉伸長(松馳) ,肌肉的剛度及驅動力也就隨之降低。肌肉的剛度可通過控制橡膠管內的氣壓實現[2],這種肌肉具有變剛度特性,可等效為一只變剛度的彈簧。
1.2 單自由度關節系統
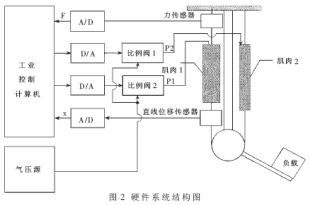
由于氣動人工肌肉只能提供單向驅動力,故需由兩條肌肉以類似生物頡頏肌的方式構成對抗性回轉關節以實現操作臂的力閉合。本文利用McKibben氣動人工肌肉作為驅動器搭建了單自由度頡頏關節系統。此系統的硬件部分由氣壓驅動子系統、傳感器子系統和控制子系統組成。系統結構圖如圖2所示。
1.2.1 氣壓驅動子系統
氣壓驅動子系統由氣源、壓力伺服比例閥、McKibben氣動人工肌肉及機構部分組成。由氣源提供壓力為0.6~0.9MPa的壓縮氣體,壓縮氣體由導管經過伺服比例閥送入氣動人工肌肉中。每條肌肉均與一伺服比例閥相連并有一出氣閥門和一進氣閥門。通過控制伺服比例閥上所加的電壓即可控制肌肉中的氣體壓力。加壓后的氣動肌肉輸出收縮張力并驅動機構部分的關節轉動,因此通過對肌肉壓力的控制即可達到軌跡跟蹤所需的關節力矩。本系統中采用的McKibben氣動人工肌肉為FESTO公司的MAS-20-300N型,其工作壓力范圍為0~0.6MPa,最大工作頻率為3Hz,最大收縮為肌肉長度的25%,0.6MPa時理論作用力為300N,重復精度小于1%。壓力伺服比例閥接受控制端傳入的電壓輸入并通過調節充氣閥門和進氣閥門控制肌肉內氣壓。本系統采用了SMC公司的ITV005C-2ML型壓力比例閥。此閥的輸入范圍為0~5VDC,輸出為0.001~0.9MPa之間的壓力。
1.2.2 傳感器子系統
傳感器子系統由力傳感器和直線位移傳感器構成。通過直線位移傳感器可以測量出肌肉的收縮量,根據此收縮量可以利用肌肉和關節模型進行軌跡跟蹤控制。力傳感器測量肌肉拉力,根據此拉力與關節力矩的線性關系可以計算出關節力矩,從而完成關節的伺服閉環控制。本系統中采用的力傳感器是航天科技集團公司701所的BK-2F型高精度S形測力/稱重傳感器。其測量作用力的最大范圍可達80kg,精度為0.05%。輸出經過TS-2型放大器放大后,輸出電壓范圍為-5V~+5V。直線位移傳感器采用了WDL型直滑式導電塑料電位計。
1.2.3 控制子系統
控制子系統由工業控制計算機(IPC)、A/D" title="A/D">A/D采集卡、D/A轉換卡組成。軟件控制系統運行于工業控制計算機上,并通過D/A轉換器將數字控制量轉換為模擬量。此模擬量用以控制壓力伺服比例閥的輸出氣壓。A/D轉換器采集拉力傳感器和直線位移傳感器的數據,并提供給工業控制計算機可由軟件處理的數字信號。本系統中采用的D/A轉換器為PCL-726型6通道模擬量輸出卡。它提供了6個12位雙緩沖的模擬量輸出通道,可滿足肌肉伺服控制的需要。A/D采集卡采用了PCL-813B型12位32通道A/D卡,它提供了32通道帶隔離的直流電壓測量,精度可以滿足系統要求。
1.3 軟件系統
氣動人工肌肉驅動的頡頏關節中有2條肌肉的壓力為系統的控制變量。由于系統通過2個自由變量控制一個自由度的運動,所以構成了冗余驅動系統。可以證明,此系統可對關節力矩與關節剛度進行獨立控制。其中,前者與2條肌肉壓力差有關,后者與肌肉壓力和有關[3]。通過對關節力矩的控制可以實現精確的關節軌跡跟蹤,而通過對關節剛度的控制可以降低落地腳沖擊及系統能耗。
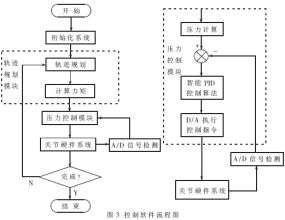
本文在工控計算機中編寫了氣動人工肌肉關節系統的控制軟件及操作界面。通過此軟件系統可以實現肌肉模型的參數設定、穩定的閉環控制及傳感器返回值的實時顯示和記錄等功能。軟件的主體部分包括軌跡規劃模塊和壓力控制模塊。軌跡規劃模塊實現了上層的關節軌跡規劃,并根據關節模型計算實現期望關節軌跡所需的關節力矩。壓力控制模塊執行底層計算,它的輸入量為上層規劃得到的期望關節力矩。壓力計算模塊根據氣動人工肌肉的實際模型計算控制肌肉運動所需壓力,其輸出為期望肌肉壓力值。智能PID控制算法模塊根據此期望壓力值和A/D采集得到的實際肌肉壓力數據進行智能PID控制,從而實現閉環控制。其輸出經數值和D/A環節轉換為輸出到硬件系統的實際控制電壓。軟件系統的框圖如圖3所示。
2 實驗及系統應用
2.1 氣動關節系統模型
為了實現對本文所搭建的氣動人工肌肉驅動頡頏關節的準確伺服控制,首先要對氣動人工肌肉進行建模。McKibben氣動人工肌肉由于具有非線性、時變特性,并且在工作時伴隨有遲滯現象,因而難于對其進行建模和控制。大多數已有研究中對于McKibben氣動人工肌肉的建模都采用Chou和Hannaford[4]基于虛功原理給出的理論模型。此模型給出了肌肉出力的理想估計,然而此理論模型直接應用于實際控制并不能得到良好的效果。本研究中采用了Reynolds等[5]提出的三元肌肉動力學模型,將氣動肌肉近似為由非線性阻尼因子、非線性彈簧因子和非線性收縮力因子并聯構成的動力學系統,則模型方程為:
F=F0+F1p+(K0+K1p)x+(B0+B1p)x (1)
其中,x為肌肉收縮長度,當肌肉完全伸張時x=0。K0、K1為彈簧因子系數,B0、B1為阻尼因子系數,F0、F1為收縮力因子。對于本文采用的氣動人工肌肉,通過在本系統上的實驗,可對式(1)中的三元肌肉模型參數進行準確估計。當肌肉壓力p取值在200kPa~650kPa之間時,通過實驗得到的模型系數可得到滿意的近似效果。應用此三元肌肉模型,本文所介紹的軟件系統對關節進行了閉環軌跡跟蹤控制,其控制精度優于傳統的理論模型。
2.2 系統應用
在本文構建的采用柔性驅動器McKibben氣動人工肌肉作為驅動源的機器人單自由度頡頏關節系統上,可對McKibben型氣動人工肌肉的建模和控制進行進一步的研究。通過在本系統上的實驗,在對三元肌肉模型參數進行準確估計的基礎上,利用本文實現的控制軟件系統可實現了閉環的關節軌跡跟蹤控制。
在進一步工作中,將基于已有的平臺和閉環控制方法重點研究兩個問題。首先研究關節剛度可控的軌跡跟蹤控制。利用此冗余系統的關節剛度量實現優化的目的,使機器人通過更好地利用自身關節的被動動力學特性來降低能量損耗。其次研究在有沖擊情況下通過控制關節剛度降低沖擊影響,進而為搭建由氣動肌肉驅動的雙足機器人提供理論準備。
參考文獻
1 Huang Q. Planning walking patterns for a biped robot.IEEE transactions on robotics and automation,2001;17(3):280~289
2 楊 鋼,李寶仁,劉 軍.一種新型氣動執行元件-氣動人工肌肉.中國機械工程, 2003;14(15):pp:1347~1349
3 Verrelst B. A dynamic walking biped actuated by pleated pneumatic artificial muscles. PhD thesis, Vrije Universiiteit Brussel, 2005
4 Chou C P, Hannaford B. Measurement and modeling of Mckibben pneumatic artificial mus-cle. IEEE Transaction on robotics and autom-ation, 1996;12(1):90~103
5 Reynolds D B, Repperger D W, Phillips C,A et al.Modeling the dynamic characteristics of pneumatic muscle.Annals of biomedical engin-eering, 2003;31:310~317