
The Challenge:
由于沒(méi)有白噪聲作為激勵(lì),同時(shí)變轉(zhuǎn)速的旋轉(zhuǎn)機(jī)械振動(dòng)中多個(gè)諧波的混疊,造成頻率混疊或者無(wú)法激勵(lì)除模態(tài),所以旋轉(zhuǎn)機(jī)械工作模態(tài)測(cè)試(OMA)一直是一個(gè)難題。
The Solution:
使用NI PXI平臺(tái)和NI聲音振動(dòng)工具包,構(gòu)造了能夠用于旋轉(zhuǎn)機(jī)械的模態(tài)測(cè)試方案,為旋轉(zhuǎn)機(jī)械的共振監(jiān)測(cè)和動(dòng)態(tài)特性測(cè)試提供了新方法
"基于LabVIEW的圖形化開(kāi)發(fā)平臺(tái),我們開(kāi)發(fā)了可用于工作旋轉(zhuǎn)機(jī)械工作模態(tài)測(cè)試的ModalVIEW-OMA軟件,對(duì)測(cè)試結(jié)果進(jìn)行處理"
背景介紹
工作狀態(tài)模態(tài)分析(Operational Modal Analysis)是從來(lái)自于工作運(yùn)行狀態(tài)的結(jié)構(gòu)振動(dòng)測(cè)量數(shù)據(jù)中提取結(jié)構(gòu)模態(tài)參數(shù)的方法,適合在無(wú)法施加人工激勵(lì)或者激勵(lì)信號(hào)無(wú)法測(cè)量的場(chǎng)合下使用。上個(gè)世紀(jì)末以來(lái),工作狀態(tài)模態(tài)分析逐漸成熟與發(fā)展,并在土木工程和工業(yè)領(lǐng)域有著廣泛的應(yīng)用。旋轉(zhuǎn)機(jī)械是車(chē)輛、船舶和機(jī)床等設(shè)備的重要組件,它的動(dòng)態(tài)特性決定了整個(gè)設(shè)備的安全可靠運(yùn)行。旋轉(zhuǎn)機(jī)械的結(jié)構(gòu)模態(tài)分析提供了可用于設(shè)備狀態(tài)監(jiān)測(cè)重要信息。使用工作狀態(tài)的模態(tài)分析方法來(lái)解決旋轉(zhuǎn)機(jī)械的結(jié)構(gòu)模態(tài)測(cè)試的應(yīng)用需求不斷增加,并引起國(guó)內(nèi)外測(cè)試工程人員的濃厚興趣。
旋轉(zhuǎn)機(jī)械的運(yùn)行一般有兩種狀態(tài):旋轉(zhuǎn)機(jī)械運(yùn)行在一個(gè)恒定轉(zhuǎn)速下。這種狀態(tài)下,旋轉(zhuǎn)引起的對(duì)整個(gè)機(jī)械結(jié)構(gòu)的振動(dòng)激勵(lì)可以被視為有著離散頻譜的多個(gè)諧波組成激勵(lì)信號(hào),相應(yīng)的結(jié)構(gòu)振動(dòng)響應(yīng)信號(hào)的頻譜也是多個(gè)諧波構(gòu)成的離散譜。如圖 1所示。另一種是旋轉(zhuǎn)機(jī)械運(yùn)行在升速或降速過(guò)程。這種狀態(tài)下,旋轉(zhuǎn)引起的振動(dòng)激勵(lì)可以被視為通過(guò)某個(gè)頻率范圍的寬頻帶掃頻激勵(lì)信號(hào),相應(yīng)的結(jié)構(gòu)振動(dòng)響應(yīng)信號(hào)的頻譜是寬頻帶響應(yīng)譜,如圖 2所示。
功率譜" src="http://files.chinaaet.com/images/20100816/fe3398dd-946d-4a79-a6d1-ce1939af8525.jpg" />
圖 1 功率譜(恒定轉(zhuǎn)速)

圖 2 轉(zhuǎn)速-頻率譜圖(升速過(guò)程)
本文是針對(duì)旋轉(zhuǎn)機(jī)械的升速或降速工作的狀態(tài)下,介紹怎樣使用諧波階次提取和工作狀態(tài)頻率響應(yīng)函數(shù)估計(jì)相結(jié)合的工作狀態(tài)模態(tài)分析方法,利用旋轉(zhuǎn)機(jī)械變速過(guò)程的振動(dòng)信號(hào)來(lái)提取旋轉(zhuǎn)機(jī)械結(jié)構(gòu)模態(tài)參數(shù)。
測(cè)試對(duì)象與試驗(yàn)設(shè)備
本文中使用的旋轉(zhuǎn)機(jī)械升速過(guò)程中的結(jié)構(gòu)振動(dòng)信號(hào)來(lái)自于一個(gè)旋轉(zhuǎn)機(jī)器故障仿真設(shè)備,如圖 3所示。

圖 3 旋轉(zhuǎn)機(jī)械設(shè)備
整個(gè)結(jié)構(gòu)振動(dòng)響應(yīng)信號(hào)通過(guò)分別安裝在兩個(gè)軸承座和機(jī)器底座的加速度傳感器獲得。軸承座上的三個(gè)加速度傳感器分別按照水平,垂直和軸向三個(gè)方向安裝,獲得結(jié)構(gòu)在不同方向上的振動(dòng)。激光轉(zhuǎn)速計(jì)用來(lái)測(cè)量旋轉(zhuǎn)機(jī)械的轉(zhuǎn)動(dòng)速度,如圖 4所示。使用兩塊8通道的NI 4472動(dòng)態(tài)信號(hào)采集卡配合NI 1042Q PXI機(jī)箱對(duì)加速度振動(dòng)信號(hào)和轉(zhuǎn)速信號(hào)進(jìn)行同步數(shù)據(jù)采集。
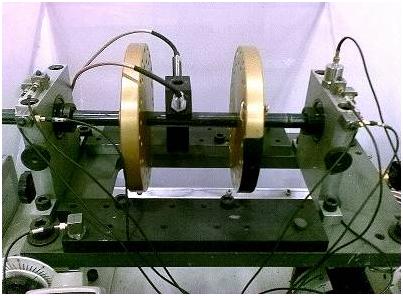
圖 4 傳感器的安裝布置
數(shù)據(jù)測(cè)量與分析
調(diào)節(jié)變頻器控制旋轉(zhuǎn)機(jī)械的轉(zhuǎn)速?gòu)牡偷礁呔€性變化,同時(shí)采集8個(gè)通道的加速度信號(hào)和1通道模擬轉(zhuǎn)速信號(hào),獲得采樣頻率為1kHz,采樣時(shí)間為24秒的結(jié)構(gòu)振動(dòng)數(shù)據(jù),如圖 5所示。
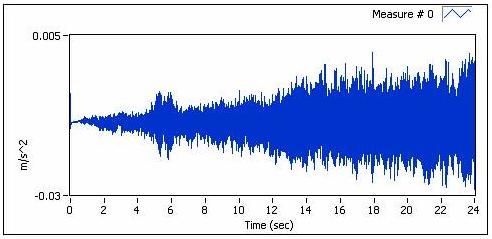
圖 5 結(jié)構(gòu)振動(dòng)信號(hào)
旋轉(zhuǎn)機(jī)械變速過(guò)程中,測(cè)量到的結(jié)構(gòu)振動(dòng)信號(hào)可以認(rèn)為是結(jié)構(gòu)對(duì)機(jī)械旋轉(zhuǎn)激勵(lì)的響應(yīng)。由于測(cè)量到的振動(dòng)信號(hào)中含有對(duì)旋轉(zhuǎn)激勵(lì)不同階次的響應(yīng)。在進(jìn)行模態(tài)分析前,需要用階次提取的方法獲得某一階次的振動(dòng)響應(yīng)信號(hào)。整個(gè)數(shù)據(jù)處理流程如圖 6所示
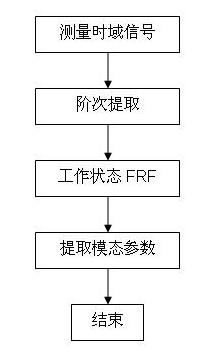
圖 6 旋轉(zhuǎn)機(jī)械模態(tài)分析數(shù)據(jù)處理流程
依照?qǐng)D6,基于LabVIEW的圖形化開(kāi)發(fā)平臺(tái),我們開(kāi)發(fā)了可用于工作旋轉(zhuǎn)機(jī)械工作模態(tài)測(cè)試的ModalVIEW-OMA軟件,對(duì)測(cè)試結(jié)果進(jìn)行處理。
在階次提取環(huán)節(jié),采用了Gabor變換與時(shí)頻濾波的階次提取方法從數(shù)據(jù)中提取某個(gè)階次的振動(dòng)響應(yīng)。整個(gè)升速過(guò)程的轉(zhuǎn)速-頻率譜圖如圖 7所示。提取出的某一階次的振動(dòng)信號(hào)如圖 8所示。
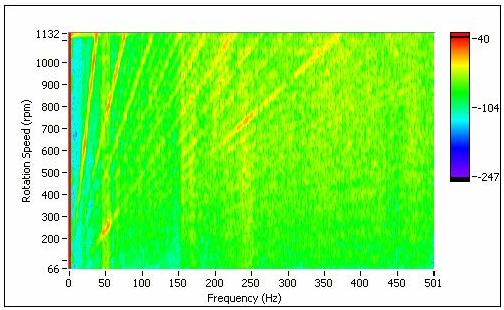
圖 7 旋轉(zhuǎn)機(jī)械升速過(guò)程轉(zhuǎn)速-頻率譜圖
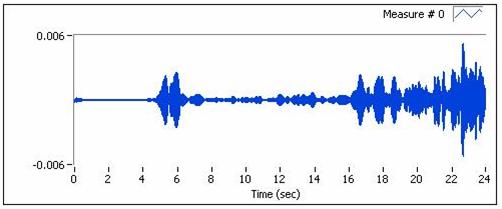
圖 8 階次提取出的振動(dòng)響應(yīng)信號(hào)
在計(jì)算工作狀態(tài)頻率響應(yīng)函數(shù)(FRF)環(huán)節(jié),工作狀態(tài)FRF的幅度是每個(gè)測(cè)量信號(hào)的功率譜幅度,F(xiàn)RF的相位是每個(gè)測(cè)點(diǎn)與參考測(cè)點(diǎn)之間互功率譜的相位。計(jì)算得到的某個(gè)階次工作狀態(tài)FRF如圖 9所示。
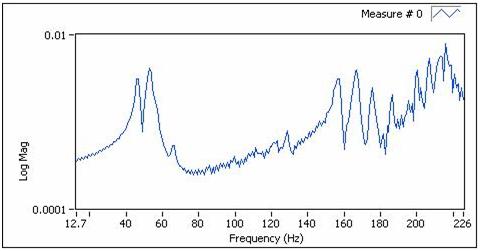
圖 9 階次提取出工作狀態(tài)FRF
獲得旋轉(zhuǎn)機(jī)械結(jié)構(gòu)每個(gè)測(cè)量點(diǎn)的工作狀態(tài)FRF后,就可以使用頻率域模態(tài)參數(shù)估計(jì)方法來(lái)提取結(jié)構(gòu)的模態(tài)參數(shù)。在模態(tài)估計(jì)環(huán)節(jié),采用了ModalVIEW中最小二乘復(fù)頻域的方法。獲得的模態(tài)穩(wěn)定圖如圖 10所示
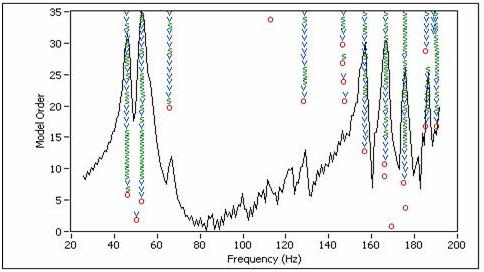
圖 10 模態(tài)穩(wěn)定圖
提取的部分模態(tài)參數(shù)如表 1所示。旋轉(zhuǎn)機(jī)械結(jié)構(gòu)的一個(gè)模態(tài)振型如圖 11所示。
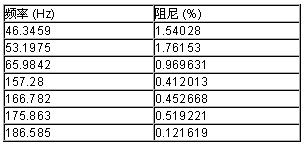
表 1 提取的模態(tài)參數(shù)

圖 11 結(jié)構(gòu)模態(tài)振型
總結(jié)
機(jī)械旋轉(zhuǎn)引起的振動(dòng)激勵(lì)可以被視為通過(guò)某個(gè)頻率范圍的寬頻帶掃頻激勵(lì)信號(hào),相應(yīng)的結(jié)構(gòu)振動(dòng)響應(yīng)信號(hào)的頻譜是寬頻帶響應(yīng)譜,可以用于工作狀態(tài)模態(tài)分析。諧波階次提取和工作狀態(tài)頻率響應(yīng)函數(shù)估計(jì)相結(jié)合的預(yù)處理方法,是旋轉(zhuǎn)機(jī)械在運(yùn)行狀態(tài)下進(jìn)行模態(tài)分析的有效手段。本文簡(jiǎn)述的測(cè)試方法已經(jīng)作為OMA模塊加入到ModalVIEW中,歡迎訪問(wèn)www.hqsignal.com 獲取詳細(xì)信息